2011-06-07 13:33:24
來源:
手持式穿墻探測雷達因為反恐、災后救援等方面的迫切需要而成為近年來的一個研究重點。常見的墻體多為混凝土結構,頻率在1~10GHz范圍內的電磁波在穿過混凝土墻壁時衰減很小,其頻率與衰減呈反比關系。其中8GHz時的衰減約為lOdB,2GHz時衰減將下降到5dB以下。本系統采用了頻譜為09~36GHz兩個倍頻程的窄脈沖作為雷達發射信號。其相對帶寬高達100%,為超寬帶信號;絕對帶寬27GHz,從而使得系統可能達到0056m 的距離分辨率。同時,沖激式超寬帶體制還具有頻譜利用率高、保密性好、抗多徑性能優異、抗干擾能力強以及結構簡單等優點,特別適合手持式穿墻探測雷達的使用。
為了實現穿墻雷達中動目標的精確定位,本文在典型探測環境下對動目標的回波做出準確建模,并結合有效的雜波抑制方法,創新性地將查找表技術引入穿墻雷達應用中,能夠迅速有效地獲得動目標的位置信息。
系統模型
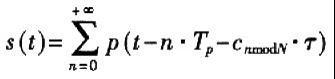
為了增強雷達系統的保密性,提高系統的抗干擾能力,在超寬帶信號發射機中,一般多采用PPM調制方式對發射信號的頻譜加以改善,然后再直接耦合到發射天線。發射信號可以描述為:
 (1)
(1)
其中p(t)為單個窄脈沖信號,Tp為信號的重復周期,{ci|i=1,2,……N)為偽隨機碼,NxT為TH-PPM調制時的最大偏移,一般取 ,T為窄脈沖寬度,nmodN表示取余。因為穿墻系統中PPM調制只在信號傳輸過程中起作用,所以為了方便討論,這里暫不考慮PPM調制的影響,即T=0。
,T為窄脈沖寬度,nmodN表示取余。因為穿墻系統中PPM調制只在信號傳輸過程中起作用,所以為了方便討論,這里暫不考慮PPM調制的影響,即T=0。
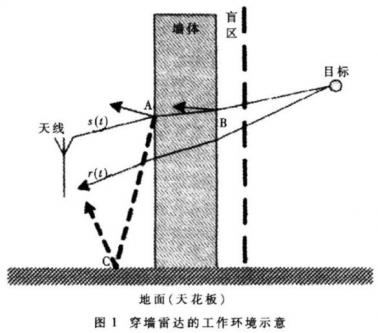
穿墻雷達的應用環境如圖l所示,發射信號在A點產生反射、散射和折射,一部分能量直接返回到天線,一部分能量經由地面C點返回,另一部分能量則被傳送至B 點,同樣經過反射、散射和折射,折射后的能量抵達目標點后,一部分被返回。從圖1可以看出,雷達接收到的信號不僅包括墻壁反(散)射回波,還包括地面(天花板)反射回波,這些回波的幅度一般都很大。為了避免接收機飽和,需要消除這些反(散)射渡的影響。常采用的方法是在每個窄脈沖發射后,天線暫時關閉,稍后再轉至接收支路,相當于在回波信號上加了一個動態距離門g(t-Tl)。其中天線關閉時間Tl由天線到墻壁的距離以及墻厚、墻介質參數等決定。因為地面反射波到達天線的時間比墻壁反射波的到達時間長,所以Tl的取值一般大于墻壁的反射時間,從而導致墻后一定距離內的回波不能被采集到,產生盲區。
對于收發共用天線,不需要考慮天線之間的耦合效應,同時假設墻體材料均勻,并且對信號的形狀不產生影響,則第i個PRT上的雷達回波可以表示為:

式(2)中第一項為動目標的回波;ai為幅度衰減因子,在不同的PRT中變化比較大;v為動目標的徑向速度;C為光速,通常v< 可以忽略。第二項為靜止目標回波,擁有固定的幅度衰減因子c;n(t)為噪聲項。
可以忽略。第二項為靜止目標回波,擁有固定的幅度衰減因子c;n(t)為噪聲項。
當探測目標的運動速度較低(或者目標做勻速運動)時,超寬帶信號的PRF很高,可以取Ⅳ個相鄰PRT上回波做脈沖積累,以消除(2)式中噪聲項的影響;然后將第i次的累積結果與第i-1次的累積結果相減.再取絕對值,結果為:

將p(1-ξ)和R(t)做相關運算,當相關結果最大時,td=ξ,即為所求的動目標回波延時。變量ξ的下限為Tl,上限為門函數的寬度與Tl之和。為了進一步提高系統實時性,減少運算量,相關處理可以采用二分的方法。
動目標的回波建模和定位
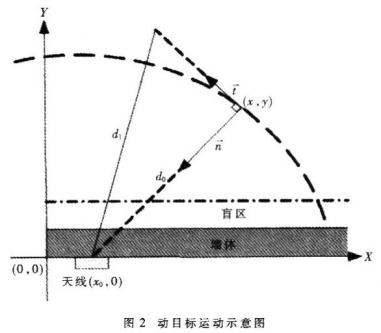
動目標運動示意圖如圖2,其中t為目標沿雷達掃描的切向運動,n為目標沿法向移動。設起始時間為0,從圖2中可以看出,當目標以均勻速度v沿切向運動時:去黑頭有效的左旋比較最好推薦很好
d1隨時間t的變化呈直線狀。根據動目標徑向距離的變化即可推知其運動方向。當需要精確的目標方位角信息時,至少需要兩根接收天線,然后利用等距弧線之間的交點即可實現對動目標的定位。
為了降低對運算單元的要求,采用了的方式對目標定位。首先根據系統分辨率的要求把成像區域劃分成大小為△×△的分辨單元(這里設距離分辨率和方向維分辨率均為△);然后以分辨單元中心為該點坐標,結合墻厚以及墻的介質參數等求出成像區域內各個單元到兩根接收天線的延時,形成查找表LUTl和 LUT2。當動目標相對接收天線l的延時為td1、接收天線2的延時為td2時,利用LUTl和LUT2各可以生成一個XY平面上的分辨單元集合
為成像區域中的點坐標,d(xi,yi)為查找表中(xi.yi)點的延時值。兩個集合的交集即目標點的準確位置。注意當采用查找表方法時,因為滿足條件點不止一個,導致了模糊區域的產生,并且受接收天線之間的距離和目標與天線距離的影響,所以方位相上的分辨率一般較差。

當探測區域內有多個動目標存在時,可結合傳統雜波圖的方式進行檢測。當無法取得雜波圖,或者目標運動速度較高時,則系統至少需要三根接收天線,消除上述方法可能產生的虛警。
穿墻雷達的參數和試驗環境
試驗所用的穿墻雷達的相關參數如下:脈沖信號的重復頻率PRF為10MHz,即重復時間PRT等于lOOns;兩根接收天線,其中一根做收發兩用;數N=64:發射信號為脈沖寬度約500p8的高斯窄脈沖,幅度為3V;盲區寬度為0;動態時間門的寬度為39.8ns,采取等效時間采樣方法,采樣步進為25ps,所以每個PRT上的采樣點數為1592,對應的有效
試驗環境:如圖2所示,設成像區域的左下角為笛卡爾坐標系的原點(O,0),收發兩用天線的位置為(x0,0),其中,x0=lm,0表示天線緊貼墻壁,另外一個接收天線的位置為(x1,0),Xl=1.32m。墻體為普通混凝土,厚約30cm.介電常數εr=4.墻后的成像區域為長6m、寬3m的狹窄甬道,兩側為試驗臺,擺滿了各種電子儀器。
試驗中各個環節所得的信號波形如圖3所示,圖3(a)為單個PRT上的回波波形,圖3(b)和圖3(c)為64個脈沖積累后的回波波形,圖3(d)為圖3(c)和圖3(a)兩個回波的對消結果。可以看出該方法能夠比較好地抑制靜止雜渡。將圖3(d)中的回波與模板做相關處理,即可求得動目標的延時td= 15ns。

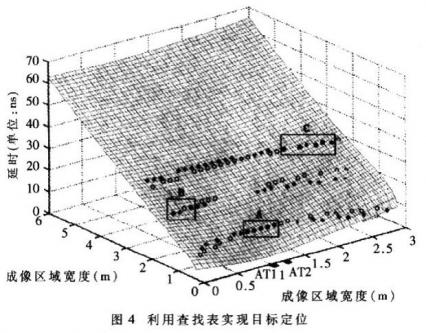
當分辨率設置為lOcm時,根據成像區域生成圖4中網格所示查找表。ATl和A12為兩根接收天線的位置,A、B、C為從運動過程中摘錄的三個點,其中A 點到ATl和AT2的延時相等,B點到AT2的延時比到ATl的多lns,C點到ATl的延時比到AT2延時多1ns。可見利用查找表的結果能夠比較準確地確定目標的當前位置。同時從圖4中可以看到每個點都包含了幾個目標的可能位置,即前面所說的模糊區域。因為探測目標人體本身就占據若干個分辨單元,所以模糊區一般不會影響到穿墻雷達的目標觀測。
本文較詳細地介紹了穿墻雷達中的動目標檢測和定位方法。該方法對系統的計算單元要求很低,圖像刷新率快,便于DSP實現,已經在樣機試驗中取得了良好的效果,未來將在各種非侵入式探測中發揮較大作用。