系統針對“低慢小”無人機飛行高度低、運動速度慢、雷達散射面積小等特點,綜合了主被動雷達、可見光、紅外等探測手段,采取了多種措施從通信、導航以及任務載荷等方面對無人機實施干擾,最大限度地阻斷其信息流,實現了全天時、全天候的對無人機的有效探測、監控和打擊,從而消除對重要目標的威脅。
一、系統特點
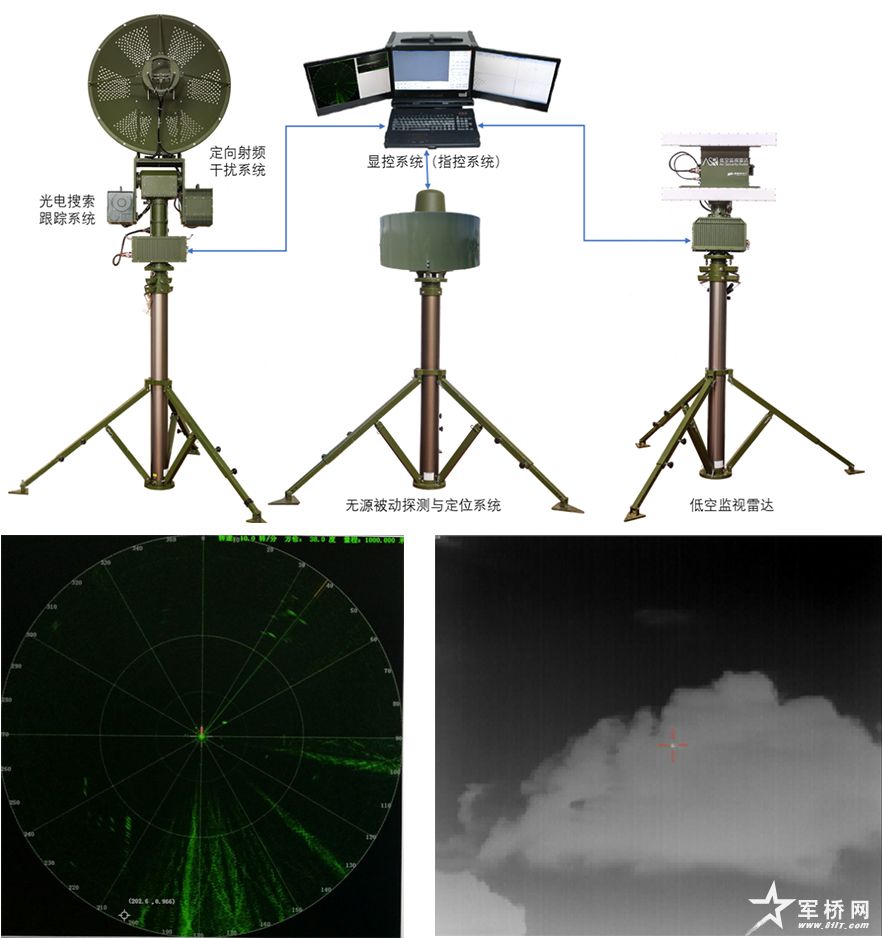
l “ 復合探測、察反一體”。系統具有多種探測體制與手段,能夠提高復雜背景下的“低慢小”目標探測和預警能力。系統配備射頻干擾模塊,完成 “軟殺 傷”作戰任務。
l 高度智能化、自主化,可在完全無人工參與條件下,依靠智能化控制邏輯,獨立完成整個反無人機作戰任務,可做到24小時無人值守。
l 體積小巧、輕便,安裝方便,能夠適用于固定基站、車載、船載等不同環境下的應用。
l 支持多節點組網應用,能夠實現大范圍區域內的無人機管控應用。
l 可方便地擴展其它探測體制及無人機管控手段。
二、主要技術指標
1、監視雷達
● 探測距離:
◆ 小型固定翼無人機飛行器(RCS≥1m2):8km
◆ 微型多旋翼無人機(RCS≥0.01m2):3km
● 探測范圍:
◆ 方位360°
◆ 俯仰20°或10°可選(對應兩種不同規格的雷達天線)
● 數據刷新率:3s(對應伺服系統20RPM的轉速)
2、光學搜索跟蹤系統
● 最大識別與跟蹤距離:大于1km
● 搜索跟蹤范圍
◆ 方位:0°~360°
◆ 俯仰:-10°~60°
● 跟蹤精度(伺服系統):優于0.1°
● 最大跟蹤角度(伺服系統):大于60°/s
3、定向射頻干擾系統
● 干擾頻段
◆ 無線衛星導航:GPS/GLONASS/北斗
◆ 無線遙控:2.4G~2.5G Hz;
◆ 擴展干擾:400M~900M Hz及5.8G~5.9G Hz。
● 干擾信號樣式:
◆ 掃頻信號、帶限白噪聲信號等
◆ 干擾信號樣式可設置及編程擴展
● 最大干擾距離:大于1.5km
● 干擾模式:阻塞式干擾;采用軟件無線電架構,支持其它干擾模式擴展
● 最大干擾信號帶寬:100MHz。
● 最大干擾功率:20w。
● 干擾覆蓋范圍
◆ 方位:0°~360°;
◆ 俯仰:-20°~70°。
● 應用環境:全天候正常工作,系統防水、防塵、防沙及防鹽霧
● 機動性:單節點反無人飛行器系統總重量小于100kg,可架設在專用桅桿上,亦可通過專用安裝架固定在各類車載、船載等移動平臺及高壓電線桿和鐵塔等固定建筑上。