2018-03-15 16:17:35
來源:信息與電子前沿
引 言
信息化戰爭中,制電磁權已經成為作戰雙方激烈爭奪的“制高點”,只有充分認清作戰雙方的電子裝備能力,合理部署己方的電子裝備,構建有利于己而不利于敵的戰場電磁環境,是奪取制電磁權乃至奪取戰爭主動權的前提和基礎。
本文針對戰場電磁環境搭建與推演的軍事需求,開發了航空電子對抗作戰推演系統,主要研究了信息化戰場上各型作戰平臺的航跡規劃、通信、雷達、電子對抗、武器等系統的標準化建模以及信息對抗的可視化問題,實現了欠實時、實時、超實時的自動或人在環的作戰方案推演,對優化戰場裝備兵力部署,輔助制定電子戰方案和戰場頻譜管理計劃等具有重要的意義。
1.系統體系結構
1.1 總體結構
航空電子對抗作戰推演系統采用紅藍雙方對抗的模式在計算機平臺上實現兵力生成、作戰想定、推演控制、記錄回放、效能評估等功能,總體結構如圖1所示。系統根據任務想定建立紅藍雙方參戰兵力,仿真雙方的戰斗機、轟炸機、預警機、干擾機、地/海面引導/警戒雷達、地/海面防空導彈等系統的工作模型。配置方式上,紅藍雙邊推演兵力可以根據模型仿真粒度分布在一臺或多臺計算機上,作戰想定、推演控制、記錄回放、效率評估、戰場電磁環境仿真等模塊運行在獨立的計算機上,為保證系統的靈活性和可擴展性,各平臺通過在駐留在終端的通信Agent實現數據交互。
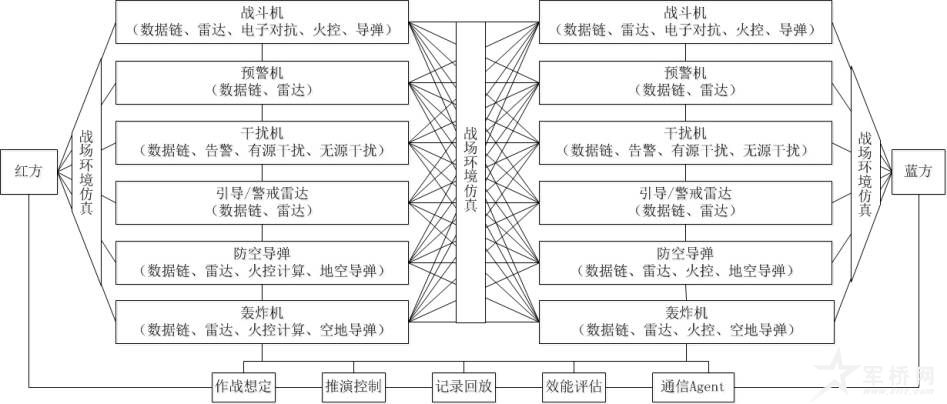
圖1 總體結構
仿真過程中,紅藍雙方的戰斗機平臺主要仿真數據鏈、機載火控雷達、自衛電子對抗、機載空空導彈的火控和彈道的工作過程;轟炸機主要仿真數據鏈、機載火控雷達、空地導彈的火控和彈道的工作過程;預警機主要仿真機載預警相控陣雷達的探測能力和基于數據鏈的情報分發能力;干擾機主要仿真數據鏈、機載告警、隨隊干擾、支援干擾、無源干擾的工作過程;地(海)面引導/警戒雷達主要仿真地(海)對空雷達對空中目標的探測、跟蹤及情報分發、指揮引導能力;防空導彈系統主要仿真制導雷達的目標探測、跟蹤能力和地空導彈的火控、彈道計算過程。系統具有獨立的碰撞檢測和數據記錄模塊,以進行第三方的實體墜毀或摧毀判決。
其中,戰場中各實體的雷達、干擾、導引頭、指令制導等電子設備的發射信號通過脈沖描述字將信號波形發送至戰場中所有其他實體的雷達和干擾設備的天線陣面,各實體根據自身的工作狀態對接收的脈沖描述字進行接收計算和信號數據處理。為了建立更加逼真的戰場環境,各實體將發射信號發送至獨立的戰場環境仿真模型,由戰場環境仿真模型對所有環境中的電磁信號進行衰減計算、編排重組后發送給各接收實體進行接收仿真計算。
1.2實體模型及模型體系
在以航空電子對抗作戰評估為中心的推演系統中,實體模型主要包括戰斗機、轟炸機、預警機、干擾機、地/海面引導/警戒雷達、地/海面防空導彈等系統的電子設備及武器模型。各實體模型應能有效反映兵力實體在作戰過程中的自主行為能力,具有行為的逼真性、對抗性、協同性,能夠完成對環境和指令的響應。為了保證系統的可重用性和可擴展性,需要對實體模型進行標準化、規范化建模,建立統一的接口標準和模型體系。
作戰平臺的標準化建模仿真流程如圖2所示。由于不同作戰平臺在不同的狀態下,其模型數量和運算量是不同的,為了保證作戰推演速度和統一時間基準,各模型根據當前推演時間動態計算自身仿真步長。對雷達設備模型,為了模擬雷達操作手或飛行員操縱雷達天線掃描的行為,系統需要在推演初始或在推演過程中由指揮參謀人員指定雷達擬跟蹤的目標,此時,戰場環境仿真模型將發送雷達的方位、俯仰掃描中心,以保證雷達天線主瓣照射目標,進而及時有效地自動截獲、跟蹤指定的目標。此外,對雷達探測到的目標,雷達將根據工作模式和多目標跟蹤結果自動刪除丟失的目標,告警目標也將根據記憶時間自動刪除消失的威脅目標。
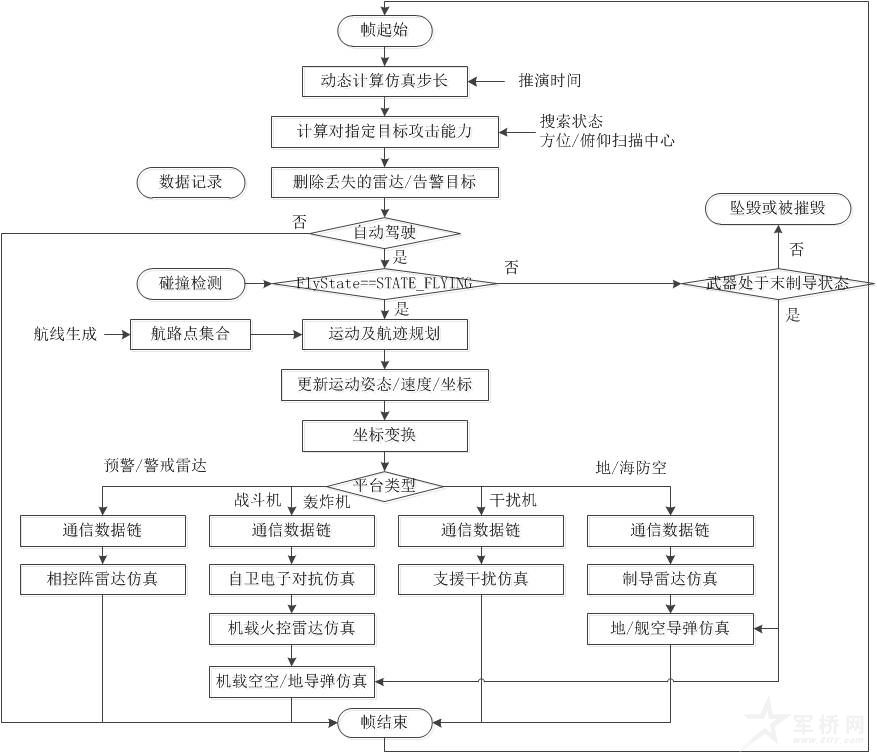
圖2 作戰平臺建模仿真流程
系統支持作戰平臺的自動閉環推演計算,也支持人在環路的作戰平臺控制(如飛行模型器等),對前一種情況,系統根據獨立的碰撞檢測結果確定自身狀態,對后一種情況,系統僅獲取作戰平臺仿真計算結果而不進行模型解算。當平臺處于自動駕駛且未墜毀或未被摧毀時,平臺將根據生成的航路點和自身姿態、速度等信息自動進行航跡解算,并輸出新的運動狀態,進而實現從直角坐標到平面坐標的解算。
在標準化、模塊化建模框架下,各作戰平臺根據自身類型確定模型加載數量、種類和裝備參數,從而執行各自的模型解算過程。考慮到平臺和模型的從屬關系,當進行機載空空/空地導彈或地/艦空導彈仿真時,如果導彈進行末制導狀態,則在完成彈目碰撞檢測后再進行墜毀或被摧毀判決。
2.作戰推演分析
航空電子對抗作戰推演環境的構建涉及到空中、地面、海面的各種作戰平臺,為此,系統建立了基于數字地圖的計算機兵力生成系統,依據建立的通信、數據鏈、雷達、電子對抗、飛行和武器等數據庫,可以動態生成戰場想定,并在指揮控制模塊的運行控制下執行作戰推演。系統在累計步數23341幀,仿真時間至5:00 min,當前步長為10 ms時的典型畫面如圖3所示。
2.1作戰想定
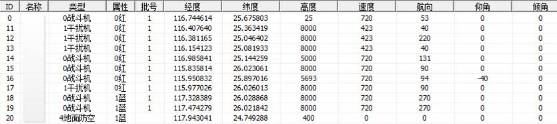
圖3所示的戰場對抗態勢初始參數如表2所示。其中,紅方14號戰斗機在紅方11、12、13號電子戰飛機的遠距支援干擾下對藍方20號地面防空系統進行突防打擊。圖3中顯示了各飛機的飛行航線,飛機將沿著規劃航線和初始速度自動飛行。圖3上方演示了紅方15、16號戰斗機在17號電子戰飛機的隨隊支援干擾下對藍方18、19號飛機進行攻擊的初始對抗態勢。
表1 初始飛行對抗參數
其中,紅方11、12、13號電子戰飛機的告警及干擾典型參數如表2所示,藍方20號地面防空雷達系統的典型參數表3所示。
表2 電子對抗典型仿真參數

表3 雷達典型仿真參數

2.2 對抗結果
仿真時,雷達根據指定的掃描圖形和速度進行周期性掃描,通過不斷接收戰場環境仿真模型發送的目標回波、干擾、噪聲脈沖描述字,進行探測能力判決,并輸出在當前環境下對典型目標的探測距離,仿真結果如圖3所示。
對藍方20號地面防空雷達系統,未受到干擾時,對典型目標最大探測距離Rtmax=120km,受到干擾后,在13號電子戰飛機的干擾方向上最大探測距離Rjmax=20km,干擾扇角θjmax=60,對目標搜索距離降低系數為βEW=6。
對藍方18號飛機,未受到干擾時,對紅方15號目標的信噪比(S/N)to=28.6,受到干擾后,信干比(S/N)jo=0.0045,在紅方15號飛機的攻擊過程中,藍方18號飛機始終未能有效截獲紅方15號飛機。
2.3 推演分析
在圖3所示的作戰想定態勢下,各探測曲線含義如下:1號曲線表示藍方20號地面防空雷達系統在內部噪聲和紅方11、12、13號電子戰飛機的遠距支援干擾下,雷達指向紅方14號飛機的情況下,其天線掃描一周,雷達在各個方向上的典型探測距離值。由于采用了極低副瓣天線,雷達在主瓣偏離電子戰飛機壓制干擾的角度,其探測距離基本保持不變;在方位284°附近,雷達主瓣對準干擾機方向,受到強烈的壓制干擾,最大探測距離壓縮為20.097 km,紅方14號突防飛機處于電子戰飛機的有效支援干擾壓制區域內。然而,隨著紅藍對抗平臺的運動變化,壓制區也隨之移動,當紅方11號電子戰飛機進入飛行轉彎區域時,由于飛機姿態調整、航向改變導致支援干擾失效。此外,從圖中可以看出,紅方12、13號電子戰飛機由于協同不利,導致對藍方20號地面雷達的壓制凹口不連續,沒能起到協同干擾的效果,也無法保證穩定的干擾壓制區域。
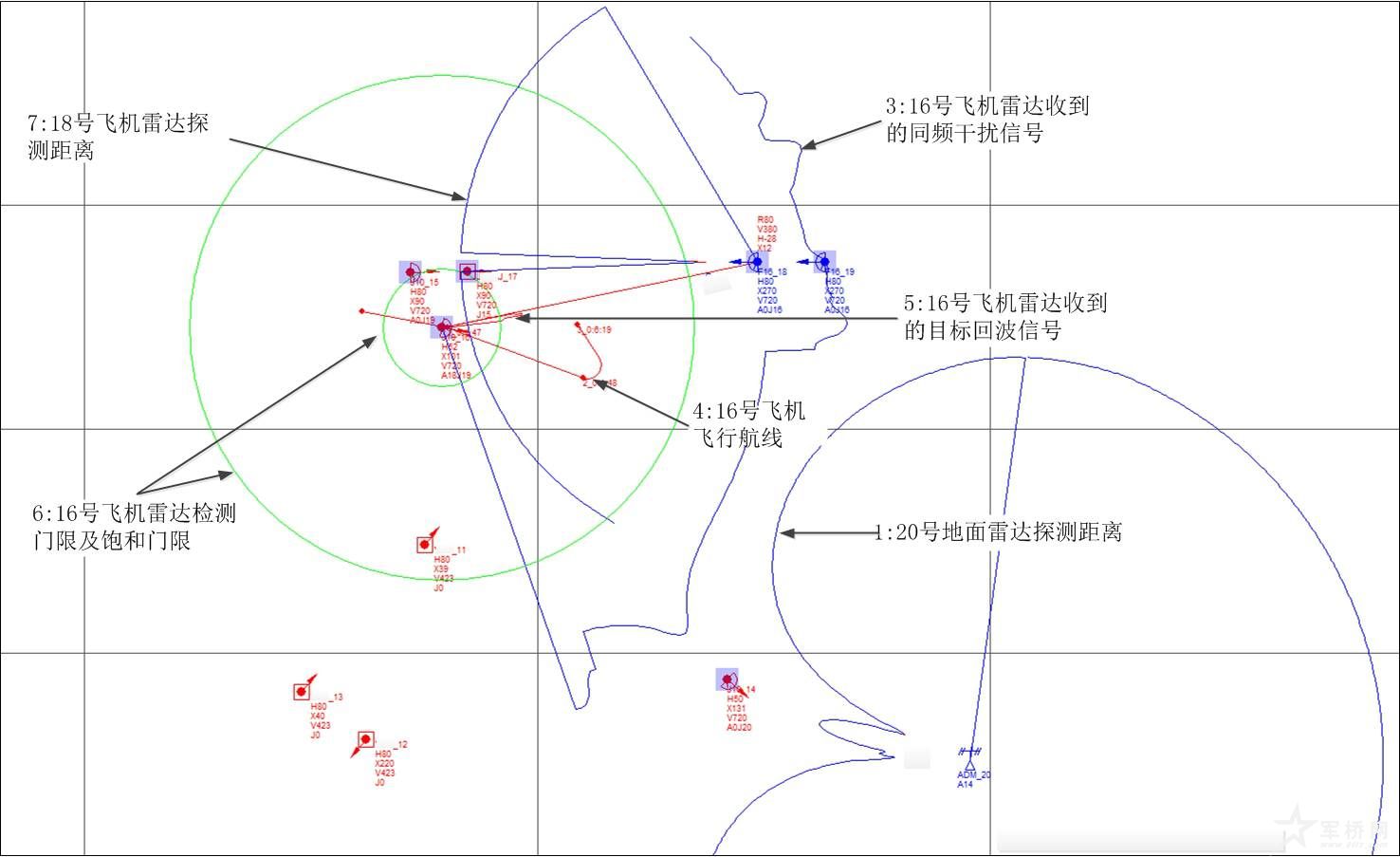
圖3 航空電子對抗作戰推演分析示例
對藍方18、19號飛機而言,其受到紅方17號飛機強烈的隨隊支援干擾。其中,7號藍色曲線表示18號飛機雷達對典型目標的探測距離變化情況,在航向268°方向,其探測距離被壓縮至10.254 km,紅方15號飛機處于有效的掩護區域內,紅方16號飛機處于掩護區域之外。
圖中5號紅色曲線表示紅方16號飛機雷達接收到的目標回波功率分布情況,6號曲線指示的綠色內環表示雷達的檢測門限,綠色外環與內環的差值表示雷達接收機的動態范圍,3號曲線表示16號飛機雷達接收到的干擾信號功率分布情況。經分析,紅方16號飛機雷達和15號飛機雷達的工作頻點相同,在沒有采取抗干擾措施的情況下,紅方16號飛機雷達受到嚴重的同頻干擾,協同失敗,并被藍方18號飛機擊落。
結 語
航空電子對抗作戰推演系統通過建立紅藍雙方參戰兵力的運動、電子、武器系統的設備及行為模型,實現作戰雙方的自主模擬推演與效能評估。本文通過建立統一的接口標準和模型體系,實現了對各作戰平臺的標準化、規范化建模,推演結果表明各作戰平臺具有良好的逼真性、對抗性、協同性和自主性特點。該系統已成功應用于多型作戰研究與訓練系統并取得良好的訓練效果。
參考文獻略
轉自:信息與電子前沿
原作者:空軍第一航空學院專家陳國棟 黃巖毅