2022-09-06 10:35:00
來源:碩博科技
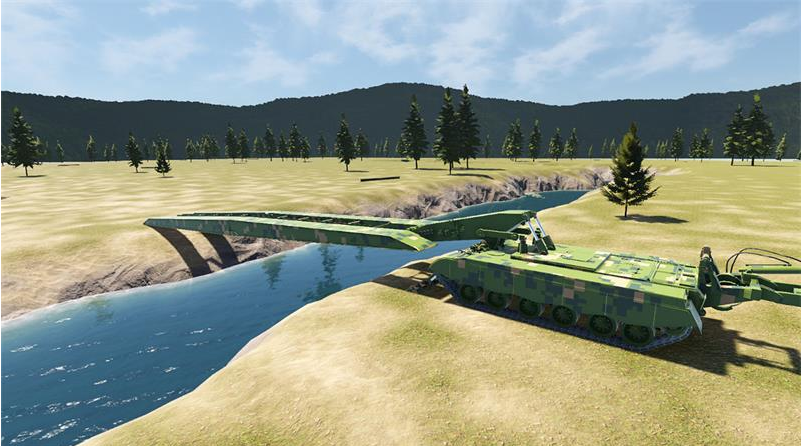
大型的機械裝備都面臨著訓練難度高、危險性強的問題,例如部隊裝備的某型掃雷車。該型掃雷車主要用于在開辟通路中實現(xiàn)控深、發(fā)射、磁掃、通標等動作進行雷場的清除和處理,本身具有一定的危險性。碩博所研發(fā)生產(chǎn)的該型掃雷車模擬器能夠?qū)崿F(xiàn)大型設備的室內(nèi)訓練,將訓練損耗和訓練風險基本降為0,能夠取代真實裝備的野外訓練,滿足系統(tǒng)所需要的精度和仿真度,在實際使用過程中取得了良好的效果。

系統(tǒng)的結(jié)構(gòu)與功能原理
該型綜掃車模擬器是主要是由計算機、顯示系統(tǒng)以及模擬裝甲車的駕駛艙形式的仿真操作艙三部分組成。該型掃雷車模擬器的控制裝置采用與真實裝備相同的操作控制裝置和操作平臺,駕駛操作平臺從外形上與真實裝備的駕駛艙、作業(yè)艙基本相同。仿真操作平臺主要是用于訓練對該型掃雷車的操作使用和駕駛訓練。控制計算機采集平臺實時傳輸?shù)闹菩盘枺?jīng)過A/D轉(zhuǎn)換,變?yōu)橛嬎銠C可以利用的數(shù)字信號,控制計算機調(diào)用仿真程序?qū)崟r輸出場景。
在訓練模擬器中,系統(tǒng)的計算機用來采集掃雷控制面板的開關(guān)信號輸入和駕駛平臺的油門、踏板等模擬信號輸入,計算機系統(tǒng)用以模擬該型掃雷車的作業(yè)裝備工作模式,系統(tǒng)建立了土壤類型和吃土深度的阻力系統(tǒng)數(shù)學模型,通過判斷土壤條件和油門大小的關(guān)系,來實時顯示掃雷效果。
1、實現(xiàn)該型掃雷車駕駛和操作的全過程,能夠按照半實物硬件的操作,實時顯示掃雷動作,實現(xiàn)流程步驟按邏輯排序,系統(tǒng)提示警報功能;
2、實時采集駕駛的模擬信號,模擬駕駛過程中的阻力、油門大小等駕駛功能;
3、操作錯誤數(shù)據(jù)日志,可自定義考核題庫,隨機組卷,實現(xiàn)錯誤操作的監(jiān)測和報警功能,自動結(jié)算考核成績等。

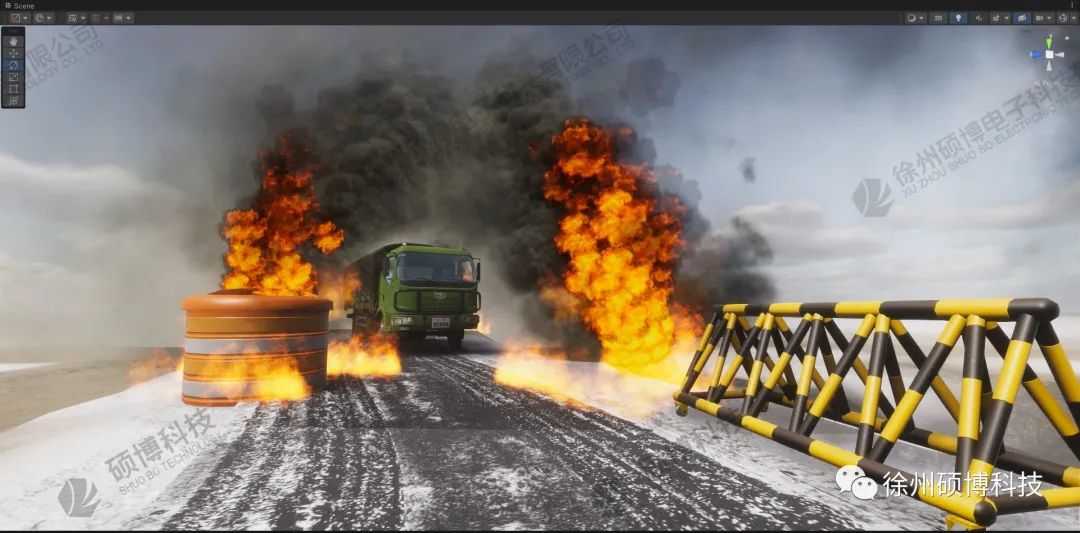
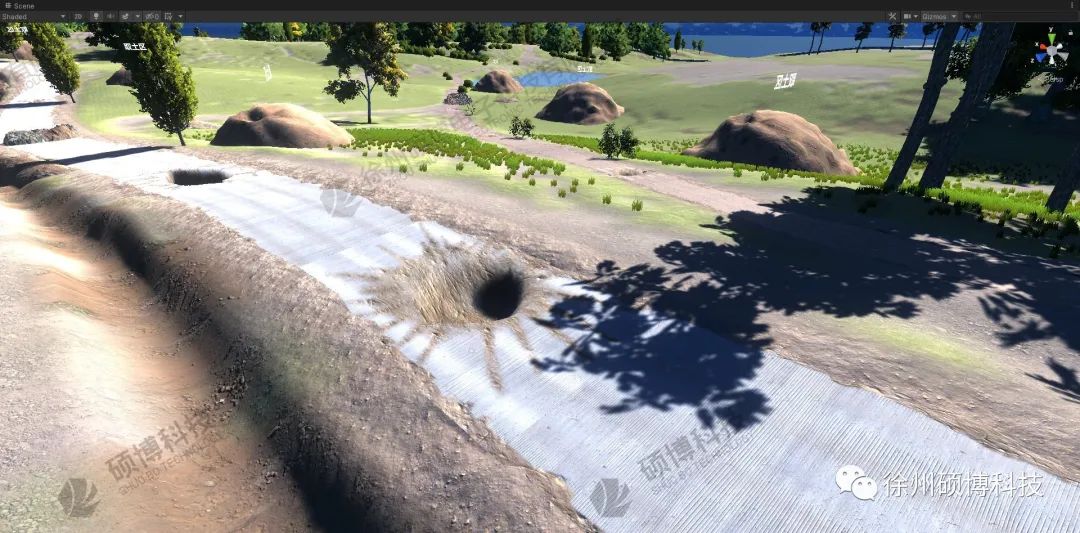
該型綜掃車模擬仿真軟件三維場景仿真,具有身臨其境、交互性強等特點,圖形的實時顯示使得系統(tǒng)具有臨場感、而場景的實時渲染速度也決定了系統(tǒng)的交互性。當操作模擬座艙的對應操控部件后,三維場景中的掃雷車裝備同時做出相應的動作和變化,模擬系統(tǒng)具有良好的交互性。仿真模擬訓練系統(tǒng)的三維場景主要包括:天氣、地形、植被、河流、溝渠、燈光、煙霧、車轍、音效等。三維場景驅(qū)動主要涉及三維模型的調(diào)用、動作邏輯符合實車性能、視角視距的選擇和調(diào)節(jié)、地形匹配和碰撞反應等技術(shù)。
其中土壤模塊的仿真是一個比較復雜的過程。犁掃過程中,土壤的表面發(fā)生變化,根據(jù)對土壤表面特性的分析對土壤表面進行了單元分割,每個土壤單元的特性主要有凸起、凹坑、斜坡等單元。土壤還分為沙土、黃土、粘土、重壤土等4類型土,依據(jù)數(shù)學模型,對土壤表面各點逐個進行判斷,在軟件中設定相應的參數(shù),從而得到逼真度很高的虛擬現(xiàn)實場景。