輪腿復合式六足機器人
2023-10-07 16:47:40
來源:軍橋網
2013年軍博會上某司展示了輪腿復合式六足機器人ARTROBOT-ML,該機器人是由六條三自由度運動腿組成的仿生機器人,可實現平地移動、上下坡、跨越臺階等多種動作,適用于無人作戰、搶險救援、巡邏偵察、物資運輸、資源勘探等場景,機器人具有六足行走、六輪驅動兩種運動模式,足式運動適用于復雜地形的攀爬行走,輪式運動適用于平坦地面快速行駛,輪式/足式運動模式可以進行快速切換。
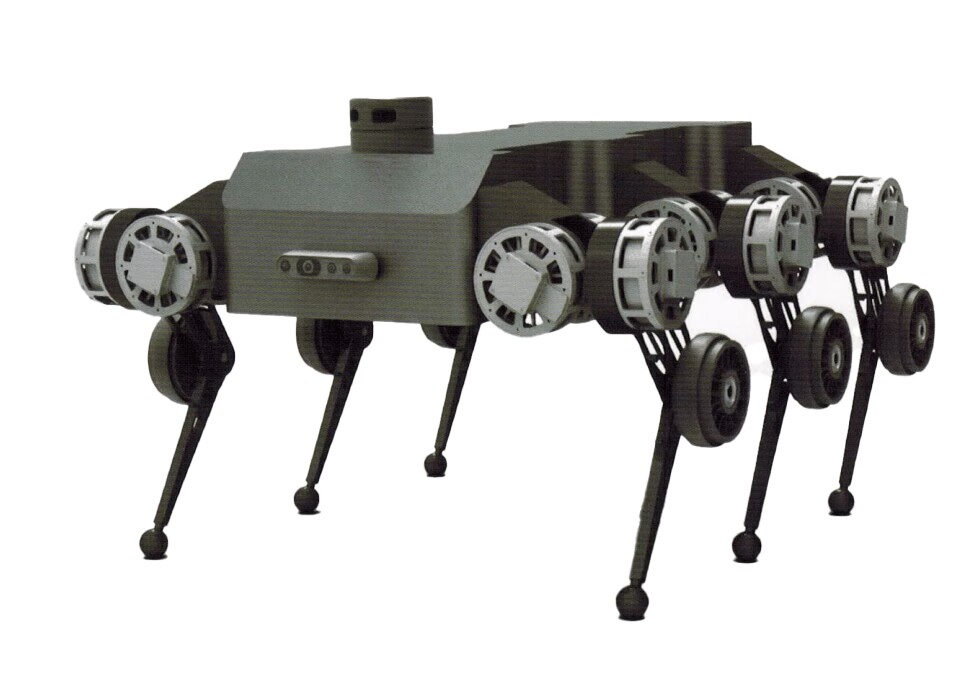
技術參數
整體尺寸:850×650×550 mm;
主體材質:鋁合金表面陽極氧化;
額定負載:≥10 kg;
越障高度: 180 mm;
通訊總線:CAN;
能源供給:鋰電池(4BV/30Ah);
控制器:鋼鐵俠自研高算力低功耗機器人控制器;
操作系統:Ubuntu/ROS;
編程語言:C/C++、Python;
搭載傳感器:激光雷達、深度相機、IMU、絕對值編碼器等;
輪腿數量:六條運動腿,六個驅動輪;
保護設計:電池過充過放保護、防高溫保護、關節堵轉保護、過壓過流保護足式;
運動指標:最大速度0.5m/s,最大抬腿高度180mm;
輪式運動指標:最大速度1m/s。
- 關鍵詞:
- 輪腿復合式
- 六足機器人
- ARTROBOT