現代戰爭環境的復雜性導致了對戰場偵察的危險系數越來越高,為了降低人員及裝備的消耗、安全高效地執行任務、減少作戰成本,使用無人機長時間對敵方目標進行偵察、突襲、攻擊等任務已成為有效的作戰手段。但單無人機在巡航偵察時間有限、攜帶傳感器種類有限、執行任務范圍有限、戰場環境復雜及自身故障或被擊落等原因,無法保證完成戰場所需的所有任務。因此,多無人機協同作戰可更好的實現對敵戰場的情報搜集與打擊等任務,從而提高地面指揮人員對戰場信息的認知與分析能力,提升作戰效能。
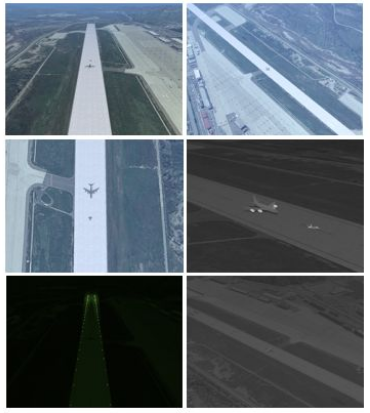
基于未爾科技自主研發的VRAD SensorXpert傳感器仿真平臺打造的“多無人機傳感器仿真系統”,可實現多無人機的全方位、全天候、全天時、多波段、多場景和多任務的協同作戰仿真與訓練。
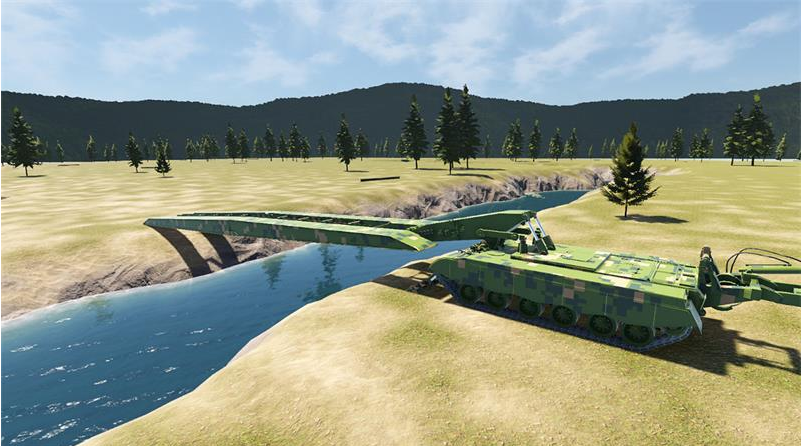
圖1 多無人機多視角成像
多無人機傳感器仿真系統可實現如下主要功能:
(一)多無人機協同偵察任務規劃及數據傳輸
針對敵方目標所在位置和天氣環境等因素的不同,用戶可合理配置無人機數量、攜帶傳感器類型和無人機飛行路徑。界面支持配置各無人機傳感器的參數、目標點氣象環境參數和運動軌跡路線,同時可通過網絡實時接收用戶仿真系統生成的無人機軌跡和傳感器參數,實現無人機對目標區域的全方位偵察。
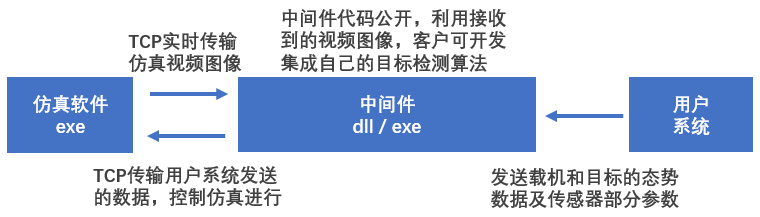
圖2 基于中間件的網絡傳輸方式
除上圖所示方式外,還可通過FC光纖、反射內存網、串口及總線方式傳輸有效的控制指令,且中間件的開放利于用戶進行傳輸接口的拓展。
(二)多波段多場景圖像生成及傳輸
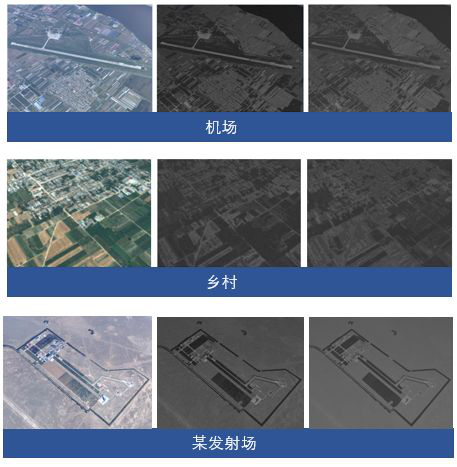
針對不同的作戰場景和大氣環境,構建多種三維背景環境,如機場、丘陵、鄉村等,并提供有效的傳感器成像手段,仿真波段覆蓋可見光(黑白或彩色)、微光夜視、中波紅外和長波紅外等。
圖3 不同作戰場景成像
(三)偵察目標檢測定位
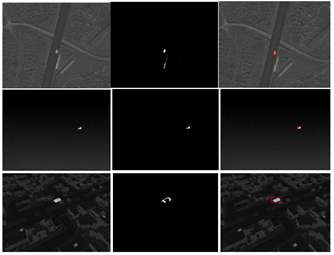
為精準的使無人機實行打擊任務或指引導彈末制導,系統提供經典的目標檢測等算法,可通過無人機和傳感器姿態信息解算目標地理坐標與屏幕坐標,獲取米級精度的目標及偵察區域的定位功能。
圖4 目標檢測
圖5 目標檢測定位
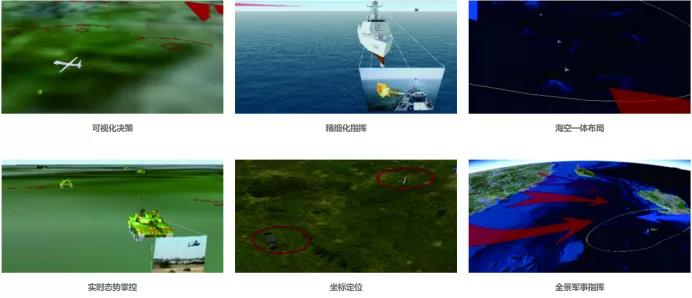
除上述功能外,多無人機傳感器仿真系統還能夠在無人機飛行路徑規劃、飛行偵察輔助顯示、多源圖像融合與質量評估、對地/海/空的目標檢測與識別算法研究等方面提供支撐,且支持半實物接口仿真和圖像數據庫構建等功能。
多無人機協同體系是一種新興且復雜的作戰模式,為使這項技術更科學成熟,須綜合運用大量的先進模擬與仿真技術為研究打牢基礎,同時還需理論研究與試驗驗證為實際戰場應用提供保障。未爾科技以VRAD SensorXpert傳感器仿真平臺為基礎打造的“多無人機傳感器仿真系統”,可有效提升多無人機的全方位、全天候、全天時、多波段、多場景和多任務的協同作戰仿真與訓練能力,強化地面指揮人員對戰場信息的認知與分析,不斷提升作戰的綜合效能。