在無人機應用中,定位模塊必不可少,但一些入門消費者對于各類定位模塊的特點比較模糊,偶爾會有留言咨詢:我已經有RTK,還要買GPS嗎?今天我們從0到1講解定位模塊基礎知識,看完這篇,大家自然知道如何選擇最適合自己的產品。
GNSS
全球導航衛星系統(Global Navigation Satellite System),泛指所有的衛星導航系統,包括GPS、GLONASS、北斗等衛星導航系統。
GPS
GPS是全球定位系統(Global Positioning System)的簡稱,通過測量出已知位置的至少4顆衛星到地面GPS接收器之間的距離,解算出GPS在地球上的具體位置。由于通過唯一的GNSS接收機確定位置,GPS精度較低,可能有一米多的誤差。
RTK與PPK都是GPS技術的升級:
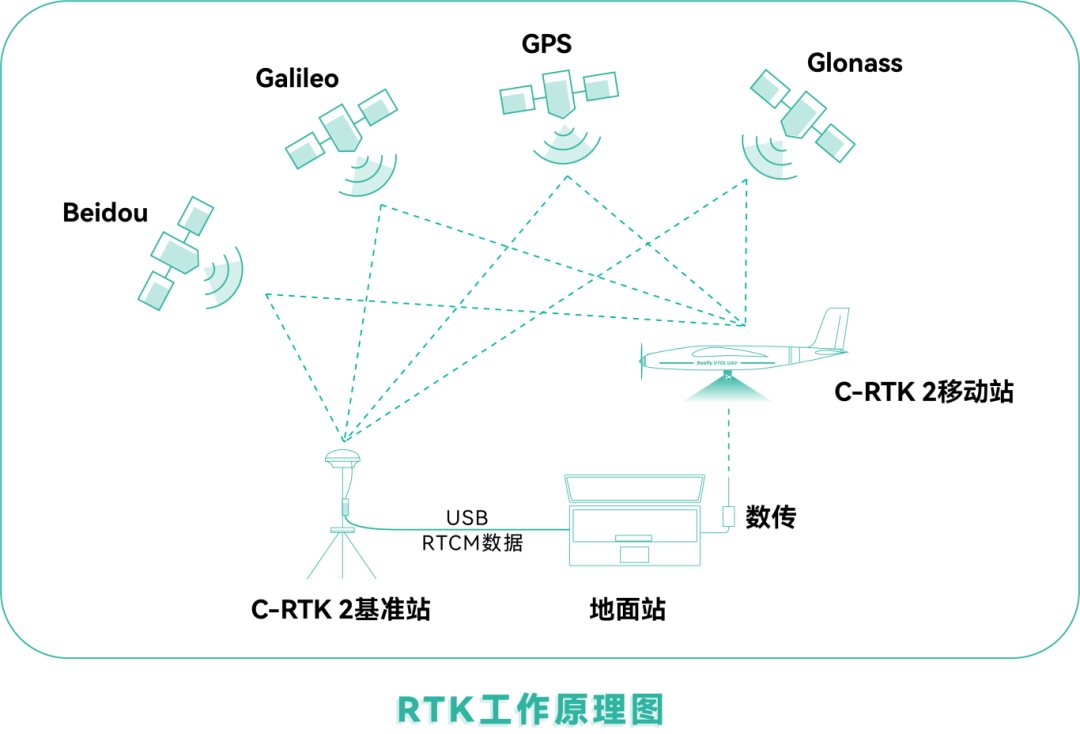
RTK技術
實時動態載波相位技術(Real Time Kinematic),是一種由基準站通過數據鏈路向移動站發送定位誤差,移動站通過誤差信息糾正定位以獲得厘米級定位的技術 。
RTK優勢
采用實時差分,可以實時查看到當前差分后的坐標。
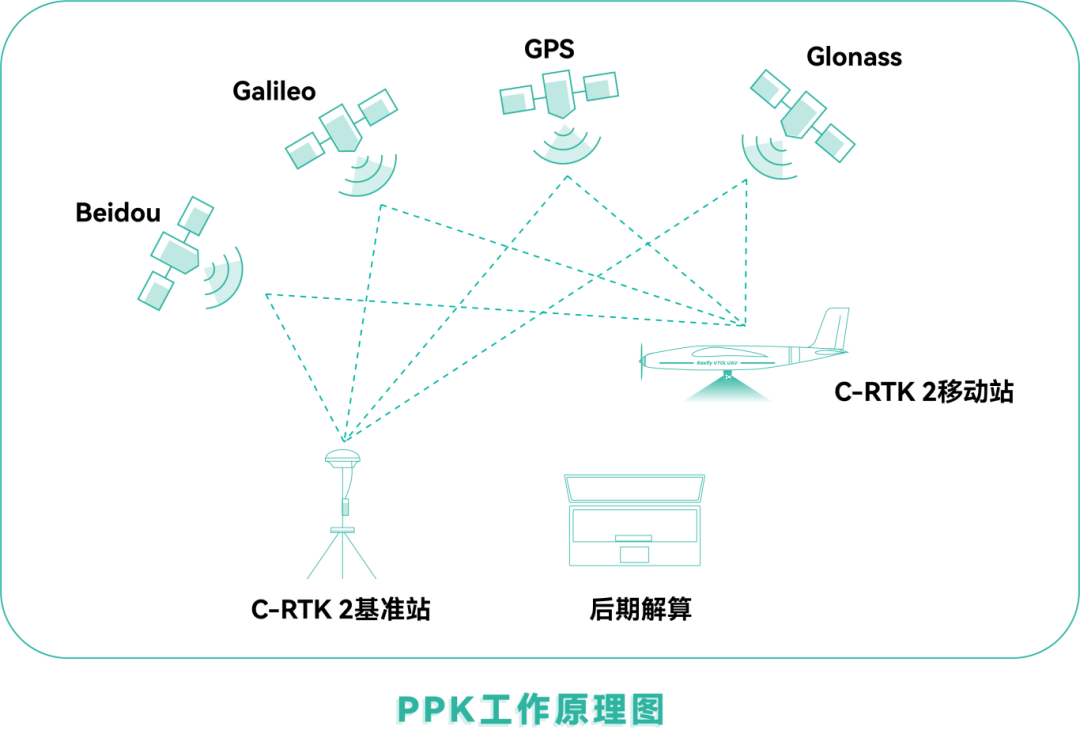
PPK技術
事后載波相位差分定位技術(post processed kinematic),是一種基準站與移動站同時觀測,形成虛擬的載波相位觀測量,確定接收機之間的相對位置,最后引入基準站的已知坐標,從而獲得流動站的三維坐標的技術 。
PPK優勢
基準站和移動站無需實時通信
作業半徑大,可達60km以上
適合航測復雜的環境,環境影響低
成果精度高
減少80%以上的像控點,甚至免像控
RTK與PPK區別
通信方式不同:RTK需要電臺或者網絡實時傳輸差分數據,PPK技術移動站和基準站不需要實時通信。
定位作業方式不同:RTK采用實時差分,可以實時查看到當前差分后的坐標;PPK需要后期處理差分后,才可獲得目標點差分后的定位信息。
作業半徑不同:RTK受通信電臺的制約,基線距離小于10km,就算采用移動網絡,也難以保證網絡不中斷;PPK技術作業不需要實時通信,一般作業半徑可達50KM,非常合適固定翼等機型應用場景。
受環境限制,RTK作業時經過大樹、房屋、山體等障礙物容易失鎖,PPK作業時不易失鎖。
定位精度不同:RTK參與解算的是實時的歷元數據;而PPK可通過后差分方式解算一個周期的歷元數據,不僅可以提高固定解率,而且解算精度高,一般可以達到毫米級。
應用場景
GPS:高性價比,1-3m定位誤差,適用于一般導航定位應用。
RTK :可以提供實時高精度位置信息,代替GPS的導航作用,更適用于處理動態位置數據,例如植保、無人機空中表演等場景。
PPK:可達到比RTK更高的精度,在運行過程中無法看到實時位置信息,更適合用于長距離大范圍的作業,在飛行后獲得精確數據,一般用于測繪。
在確認自己的需求后,我們來對比雷迅旗下各款產品:

NEO 3 沒有處理器,可滿足基礎需求。
NEO 3 Pro和Neo 3x 基本一致,Neo 3x有IP66防護等級,防塵防水。

C-RTK 9PS沒有處理器,使用的是Ublox F9P衛星接收機。
C-RTK2 設計定位為PPK+RTK。
C-RTK 2HP 通道數最多,處理能力強;雙天線測向;全星座多頻,雙頻具有更好的抗干擾能力和衛星鎖定能力。