章節概要:
1. 美國Terranaut濱海獵雷機器人
2. 美國用于海洋冰川調查的Icefin UUV
3. 西班牙Sparus II AUV
4. 意大利U-IV UUV
5. 法國NemoSens AUV
01、美國Terranaut濱海獵雷機器人
圖1-1 2023年4月10日,美國海軍陸戰隊員在夏威夷進行演習。照片中未出現的Terranaut機器人的設計目的是為了應對這種環境下的爆炸物。
(圖片來源:Clayton Baker / US Marines)
(圖片來源:Clayton Baker / US Marines)
4月19日,美國鸚鵡螺機器人公司(Nauticus Robotics)宣布,作為一種為國防創新單位(Defense Innovation Unit,DIU)設計、用于摧毀水雷的兩棲機器人,Terranaut的初期研發工作已經完成,正進展到下一階段研發。這臺機器建立在Nauticus公司先前的水上無人航行器的基礎之上。它符合無纜、自主水下作業的整體圖像,為滿足特殊的水下軍事需求,對商用水下作業工具專門進行了改造。
DIU,即國防創新單位,是國防部下屬的一個組織,旨在將商業技術領域的創新轉化為軍事應用。它不是重新發明輪子,而是著眼于簡單地為其戰車購買輪子。
Nauticus首席執行官Nicolaus Radford說:“當你有一些商用技術時,DIU就會很感興趣,他們認為這些技術可以用于國防任務。很多人都關注我們的大型橙色機器人。但機器人兩耳之間的東西(譯注:意指“大腦”)更重要。”
在Nauticus公司的聲明中,他們強調Terranaut是作為一型自主MCM機器人開發的,它可在濱海和泛浪區工作,這些正是海軍陸戰隊訓練和計劃作戰的地方,尤其是在太平洋島嶼戰爭中。正如所承諾的那樣,Terranaut將會游泳和爬行,由一個自主控制系統驅動,該控制系統可通過水聲通信接收人工指揮。
Terranaut能用履帶行駛,并配有強大的推進器,按計劃,它的機械臂可從機體上伸出,處理任何任務,如拆除水雷。
圖1-2 Terranaut機器人
(圖片來源:Nauticus Robotics)
Radford說:“它能夠在水中航行,然后改變浮力,從而獲得可觀的牽引力。假設你沿海底航行時遇到了一塊巖石,你不知道這塊巖石有多長,繞過去可能需要一段時間。”這種情況下的解決方案是從上面越過它。
在Terranaut的創造和設計中所獲的信息,大部來自于Nauticus公司在Aquanaut上的工作。Aquanaut是一臺14.5英尺(4.4米)長的潛水機器人,可在近1萬英尺(3 000米)的深度下工作,常規版的工作距離可達75英里(120千米)。它由一臺電機驅動,攜帶超過67千瓦·時電量的電池,水下基線速度為3節,電池可連續使用4天以上。但Aquanaut最與眾不同的是它的可伸縮機械臂,在不需要的時候可折疊到體里,而且它像另一臺水下機器人一樣,無需通過臍帶纜直接通信控制即可操作。
圖1-3 Aquanaut機器人
(圖片來自網絡)
Aquanaut可以感知周圍環境,這要歸功于聲吶、立體光學傳感器、原始3D點云圖像和其它傳感器。這些數據能以比在深海傳輸中更高的分辨率收集,Aquanaut能夠浮出水面或停靠對接,更快地傳輸大容量、高密度數據。
與Aquanaut一樣,Terranaut也沒有與母艇相連的臍帶纜。
Radford說,通常情況下,母艇都有臍帶纜與機器人相連,“因為你必須有一個操作員拿著操縱桿、看著高清顯示器,才能駕駛這個東西。我們說的是讓我們把所有這些都扔掉。我們可以創造一中無需臍帶纜的混合機器,它可以游得很遠。事實上,人們只是不想僅僅拍照,他們想要拾取、投放、切割、接插某些東西,于是我們開發了一種全新的水下機器,可讓你在水下作業而無需臍帶纜。”
對于能發射和管理水下機器人的船只而言,取消臍帶纜是一種設計上的解脫。但它也帶來了一系列新的問題,如:如何確保機器人執行人類操作員要求它完成的任務,現在操作員不是在駕駛而是在指揮機器;由于無線電信號和光信號的作用距離和效力都很有限,特別是在海面以下,所以水下通信十分困難。
解決這些孿生問題意味著應求助于航行器自治和聲學控制。
Radford說:“我們的數據傳輸速率相當于1987年的撥號網絡,你不會用Netflix服務器在水下播放高清視頻,但有一些方法可將你周圍3D環境中的代表性信息發送給操作員,然后操作員指揮機器人的自動駕駛儀。”
這意味著,本質上,機器人本身主要負責管理其壓載和方向控制的細節,并執行通過水聲傳輸的指令。作為回應,它將信息發送回去,允許人工選擇已經加載到機器人上的動作和行為。
就像之前的Aquanaut一樣,Terranaut將預先加載在所處環境中航行和執行被分配的任務所需的行為。一旦Terranaut駛過泛浪區淺灘,進入濱海淺水區和可視范圍內,它就會運用這些工具,采用自適應自主控制和遠程人工引導方式來拆除致命的障礙物,如水下爆炸物。
譯自:www.popsci.com
02、美國用于海洋冰川調查的Icefin UUV
圖2-1 海冰下的Icefin
(圖片來源:Rob Robbins, USAP Diver)
南極洲西部的斯韋茨(Thwaites)冰川以不穩定著稱,它正在破裂和解體,給全球海平面上升帶來了壞消息。人們正在努力了解其面積與佛羅里達州幾乎相當的思韋茨冰川的幾何結構和化學成分,以評估海水變暖和氣候變化可能對它產生的影響。
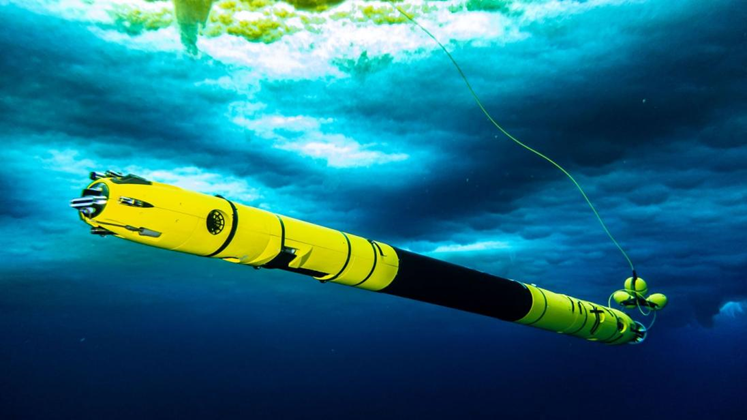
一型名為“冰鰭”(Icefin)的11英尺(3.4米)長的管狀水下機器人向我們提供了冰下深處的詳細情況,以了解南極洲脆弱的冰架是如何融化的。據本周發表在《自然》(Nature)期刊上的2篇論文,Icefin一直在提供有關冰凍水域下情況的相關細節。
這種類似魚雷的Icefin機器人最初是在佐治亞理工學院(Georgia Tech)開發的,它的第1個原型可以追溯到2014年。但它后來在康奈爾大學(Cornell University)找到了一個新家。該型機器人能夠用它攜載的一套傳感器來刻畫冰下環境。它配備了高清攝像機、光測距系統、聲吶、多普勒流速剖面儀、單波束高度計(測量距離),以及測量鹽度、溫度、溶解氧、pH值和有機物質的儀器。它的活動范圍令人印象深刻:它可潛到3 280英尺(1 000米)深處,穿過冰架上狹窄的洞穴。
由于Icefin是模塊化的,它可根據任務的需要進行分解、定制和重新組裝。研究人員可遠程遙控Icefin的航行軌跡,或讓它自主航行。
在這片冰冷的水域里,并不只有Icefin。它的旅程是國際思韋茨冰川合作項目(International Thwaites Glacier Collaboration,ITGC)的一部分,該項目中還包括其它雷達、傳感器和類似Boaty McBoatface UUV等裝備。
2020年,通過在冰上鉆一個近2 000英尺(600米)深的鉆孔,Icefin冒險越過海洋,到達斯韋茨冰川與阿蒙森海(Amundsen Sea)匯合的臨界點,那里的冰開始漂浮。由Icefin收集并經研究人員分析的數據表明,冰川已經從海底向上退卻,底部變薄,并迅速向外融化。此外,冰中某些裂縫的形狀有助于流入溫暖的洋流,使得部分冰川融化的速度比之前預期的要快。
這些新發現雖是不祥之兆,但可用于改進舊的模型,那些模型被用來預測斯韋茨冰川的變化、以及它一旦崩塌后海平面可能上升的速度。
康奈爾大學的研究科學家Peter Washam領導著用于計算融化速度的Icefin數據分析工作,他在一份新聞稿中說:“Icefin正在盡可能靠近冰的地方收集數據,這些地方目前沒有其它工具可以到達。這向我們表明,這個海洋系統非常復雜,需要重新思考海洋是如何融冰的,尤其是在像斯韋茨這樣的地方。”
在思韋茨之外,你可以看到Icefin在南極洲麥克默多(McMurdo)科考站周圍的冰海中監測生態系統,或者幫助天體生物學家了解海洋世界及其生物圈中的生命是如何形成的。
譯自:www.popsci.com
03、西班牙Sparus II AUV
西班牙Iqua Robotics公司在FEINDEF 2023國際國防與安全展會上展示了其開創性的Sparus II AUV。
圖3-1 在西班牙舉行的FEINDEF 2023展會上的Sparus II AUV
(圖片來源:Navy Recognition)
Sparus II AUV的出現改變了水下作戰領域的游戲規則。憑借其輕量化設計、不同尋常的懸停能力和特定任務的載荷能力,Sparrus II在淺海環境中表現出色,最大深度可達200米。
這型魚雷外形的AUV將高性能流體力學與無與倫比的機動性無縫結合,徹底改變了水下任務的執行方式。
效率是Sparus II設計理念的核心。它的流線型魚雷外形優化了流體動力,確保了擴展的自主性和增強的作戰續航力。
該型多功能AUV配備了1.9千瓦·時的鋰離子電池系統,可連續工作8~10小時,具體取決于具體配置。
Sparus II的關鍵特征之一是其懸停能力。憑借保持靜止位置的能力,它可提供前所未有的控制和機動性,可實現精確數據收集和精細作業。
這一特性,再加上它的輕量化結構,只需兩個人就可從任何船上輕松部署AUV,簡化了操作流程。
Sparus II采用基于機器人操作系統(Robot Operating System,ROS)的開放式軟件架構,允許用戶根據他們的特定需求輕松編程和定制任務。
譯自:www.navyrecognition.com
04、意大利U-IV UUV
DEFEA是一項著名的全球防務展會,展示了各種防務系統,包括陸海空裝備和網絡安全系統。在展會期間,意大利馬可尼工業服務公司(Marconi Industrial Services)推出了U-IV UUV。
圖4-1 U-IV UUV
(圖片來源:Navy Recognition)
U-IV長約4米,與21英寸發射管兼容,能在各種環境中輕松運輸和部署。
U-IV UUV的模塊化設計允許靈活配置和定制平臺,以適應特定任務的需求。水密耐壓內艙和優化后的外形使水可自由流動,這一關鍵特點是U-IV具有優良性能的原因之一。
U-IV配備電推進裝置和1個主螺旋槳,能夠巡航或高速航行,在艏段和艉段裝有推進器,用于提高機動性和懸停能力。
U-IV還有2個艏部控制面和1套十字布局艉部穩定鰭和方向舵,以獲得最佳控制權和穩定性,以承受外部干擾。
U-IV的最大航速在8~10節范圍內,巡航速度為4~6節,可執行各種水下任務,包括偵察、監視和探測水下威脅。
譯自:www.navyrecognition.com
05、法國NemoSens AUV
2023年5月9-11日在雅典舉行的DEFEA防務展上,總部位于布列塔尼(Brittany)的法國RTSys公司借此機會展示了它的2項產品——NemoSens和SEMA。
圖5-1 DEFEA 2023展會上的NemoSens AUV
(圖片來源:Navy Recognition)
NemoSens是一型高度通用的AUV,被設計用于一系列科學、工業和國防應用。它的輕量化和模塊化設計,加上開放的LINUX體系結構,允許用戶開發他們自己的航行算法,以獲得更大的靈活性和更充分的應用。
NemoSens的關鍵特點之一是它的蜂群技術,它使用戶能夠部署多枚AUVs來擴展任務范圍。該航行器與RTsys公司的全系列產品兼容,例如SonaDive蛙人手持系統或信標。
NemoSens擁有來自RTsys產品系列的最新升級版硬件和軟件,這使它成為同代產品中最高效、最可靠的微型AUV。軟件功能和測量傳感器(在2千克限制內)可以根據需要添加,使其能很好地適應不同任務。
NemoSens的航行能力:最大工作深度300米,速度2~8節,續航時間超過10小時。它的尺寸緊湊,長895毫米,直徑124毫米,重量小于9千克。
它可以從輕型艇上或岸上發射和回收,在整個任務過程中,它的運動可通過聲通信方式進行跟蹤。
譯自:www.navyrecognition.com