欧美日韩国产在线观看网站_亚洲欧美国产另类_秋霞成人午夜鲁丝一区二区三区_色综合中文字幕
全部
資訊
產(chǎn)品
關(guān)注微信
關(guān)注微博
新聞頭條
軍橋雜志
首頁
國防信息化
智慧軍營
通訊指揮
大屏顯控
虛擬仿真
信息安全
AI計算
安防監(jiān)控
無人機
作訓裝備
數(shù)碼物聯(lián)
軍工電子
媒體展會
方案
技術(shù)
熱門
產(chǎn)品
無人機模擬訓練
聯(lián)合作戰(zhàn)
指控中心
智能槍彈柜
智慧軍營
野戰(zhàn)兵器室
賬外機
手機管控
電子沙盤
軍事體育訓練
智慧訓練
數(shù)字化營區(qū)
無線通信
Mesh自組網(wǎng)
戰(zhàn)術(shù)訓練
虛擬訓練
仿真訓練
更多
無人機
|
解決方案
|
技術(shù)應(yīng)用
|
行業(yè)資訊
|
無人機管控
|
無人機產(chǎn)品
首頁
>
無人機
>
解決方案
> 正文
多功能四足機器人
2025-01-16 10:21:26
來源:
多功能四足機器人是一種仿生腿足式機器人,設(shè)計用來模仿動物(如狗、貓、馬等)四肢結(jié)構(gòu)和行走方式。它們通過高度復雜的機械結(jié)構(gòu)和精密的控制算法,同時配備多類型的傳感器、驅(qū)動器、控制系統(tǒng)等,使其具備極強的環(huán)境適應(yīng)能力,能夠在多種復雜地形中穩(wěn)定行走和執(zhí)行任務(wù)。
四足機器人可以在復雜地形中進行偵察、巡邏和運輸?shù)热蝿?wù),提高軍事行動的效率和安全性。
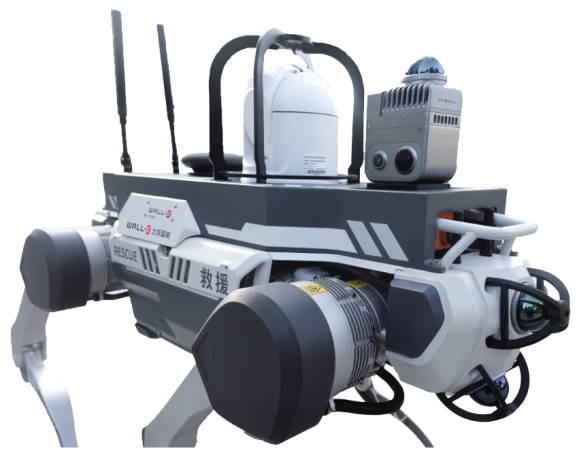
瓦力——四足機器人
中科北緯旗下的瓦力四足機器人可以輕松跨越大于20cm障礙與樓梯、45°內(nèi)斜坡,在廢墟、石堆、碎石、草地等非結(jié)構(gòu)化路面行動自如。全向靈活移動且接觸面小,避免改變現(xiàn)場環(huán)境,降低二次事故發(fā)生概率。IP67防護,在濃煙、有毒、暴雨、-20℃~55℃ 高低溫、冰雹等惡劣環(huán)境下完成偵察任務(wù)。
具備負載作業(yè)能力,可負載物資進入災(zāi)害現(xiàn)場,對被困人員實施救援。全方位呈現(xiàn)可見光、熱成像、三維地形、有害氣體、偵察路徑等綜合信息。全景成像虛擬建圖,遠距離視距圖傳,全場景掃描,現(xiàn)場環(huán)境重現(xiàn),為救援決策提供可視化信息,以及對戰(zhàn)區(qū)現(xiàn)場數(shù)據(jù)采集與保存。
核心模塊
雙光譜攝像云臺:可見光30倍變焦偵查遠處微小目標,熱成像儀穿透煙霧遮擋,追蹤熱源,獲取人員與環(huán)境溫度分布。
三維掃描建模模塊:具備實時生成厘米級精度三維地圖的能力,為搜救行動提供詳盡且即時的空間信息。還能在自然災(zāi)害發(fā)生后迅速評估建筑物和基礎(chǔ)設(shè)施的破壞情況,從而輔助救援團隊快速制定有效的搜救計劃和行動路徑。
氣體傳感器:自動識別檢測一氧化碳、二氧化碳、氧氣、可燃氣體、氮氧化合物、硫化氫等可燃有害氣體,并進行實時濃度報警。
自組網(wǎng):搭建基站與四足機器人的通訊鏈路,1km遠程操控,3km通視距離控制信號、數(shù)據(jù)、圖像傳輸信號傳輸,支持中繼進一步延展,信號覆蓋地下車庫及高層建筑等立體環(huán)境。
語音對講內(nèi)置拾音器/揚聲器,實時采集現(xiàn)場聲音,了解受困人員情況并進行救援通話。
激光雷達(頭尾部共4組):激光點云數(shù)據(jù)采集,實時掃描外部環(huán)境,對障礙物、臺階地形等進行實時建模,用于停障、避障及運動步態(tài)自主規(guī)劃。
虎賁四足機器人
“CETC-虎賁”是中電科機器人研發(fā)的一款面向教育科研、特種應(yīng)用等應(yīng)用場景的多載荷、多功能四足機器人。
該四足機器人的動力單元采用高密度模組化電機,機身與腿部采用一體化設(shè)計,高效的運動控制器使其可以適應(yīng)于多種復雜的地形和環(huán)境。擁有自主訓練智能體網(wǎng)絡(luò),助力仿生人工智能前沿領(lǐng)域探索可實現(xiàn)上層控制器/端到端兩種智能運動控制模式,提升四足機器人自主環(huán)境適應(yīng)性。
站立狀態(tài)尺寸:650mm*310mm*455mm;
折疊狀態(tài)尺寸:645mm*310mm*240mm;
重量:12(±0.5)KG(含電池);
續(xù)航:1.5-2.5h;
負重:5kg;
速度:2 m/s;
運動能力:可攀爬20度斜坡、可在草地、石子路、沙地行走;
抗擊打:274 Nm;
可選配傳感器:激光雷達、深度相機、紅外相機、蜂鳴器/警報燈;
通信接口:USB、RJ45;
外部供電接口:XT30(5V/12V/24V)。
Q20A-XL型巡邏四足機器人
五八智能旗下的Q20A機器狗自適應(yīng)各種復雜地形,并且具備強大環(huán)境感知能力,能實時收集環(huán)境數(shù)據(jù)并分析處理。通過結(jié)合環(huán)境感知能力與運動控制能力,Q20A機器狗實現(xiàn)了感控融合,在隨機復雜的環(huán)境中表現(xiàn)出高機動性與強通過性。
全地形場景適應(yīng)
運動控制算法:Q20A機器狗通過模仿學習與強化學習在仿真環(huán)境中進行大規(guī)模訓練,獲取全地形通用運動控制模型,實現(xiàn)全地形自適應(yīng)。導航定位算法:搭載雷達、GNSS、視覺相機等多種硬件功能模塊,Q20A機器狗可實現(xiàn)多融合定位導航,確保室內(nèi)、野外等各種復雜場景精準導航,為場景適應(yīng)提供決策信息支撐。
全視角環(huán)境感知
多激光雷達及環(huán)視相機組合:Q20A機器狗全身有4顆激光雷達和多個廣角低照度相機,360°無死角實時感知,組成強大環(huán)境感知系統(tǒng)。高算力模組:Q20A機器狗搭載多塊高算力模塊,可同步運行多個智能算法,實時對各類感知數(shù)據(jù)進行融合計算。
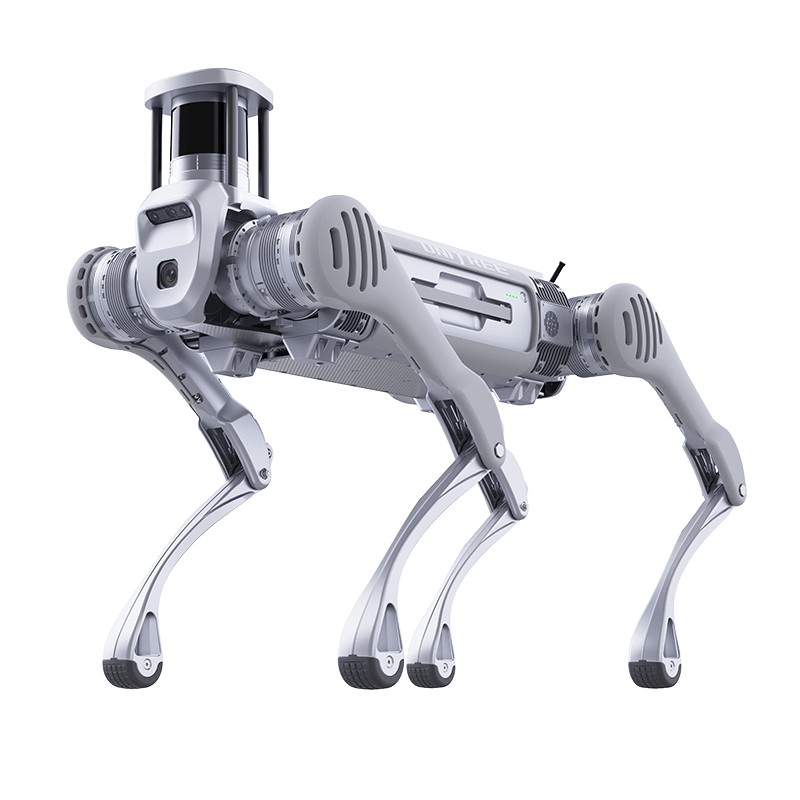
Unitree B2機器狗
宇樹旗下的 B2機器狗擁有卓越的持續(xù)樓梯攀爬能力,毫不費力地翻山越嶺。攀爬時,依舊具有極致的穩(wěn)定性和平衡能力。持續(xù)行走負載大于40kg,提升100%;20kg負載持續(xù)行走大于4小時,里程超過15km;續(xù)航能力提升200%; 空載持續(xù)行走續(xù)航大于5小時,里程大于20km。
產(chǎn)品參數(shù)
站立尺寸約1098mm×450mm×645mm;
折疊尺寸約880mm×460mm×330m;
重量約60kg(整機,含電池);
電池:容量45Ah(2250Wh),電壓 58V;
續(xù)航綜合運行續(xù)航4-6小時;
空載持續(xù)行走> 5h,且續(xù)航里程> 20km;
20kg 負載持續(xù)行走> 4h,且續(xù)航里程> 15km;
替換輪足選配;
站立負載最大120kg;
持續(xù)行走負載>40kg;
樓梯行走能力最大臺階高度 20~25cm;
攀爬能力正向爬上和爬下高度 40cm 臺階;
工作溫度-20℃ ~ 55℃;
斜坡行走能力> 45°;
奔跑速度> 6m/s ;
跳躍深塹寬度0.5~1.2m;
最大跳遠距離> 1.6m;
防護等級IP67;
控制和感知算力:標配Intel Core i5(平臺功能),Intel Core i7(用戶開發(fā));選配Intel Core i7及Nvidia Jetson Orin NX(最多3塊);
感知傳感器配置:3D 激光雷達 ×1+ 深度相機 ×2+ 光學相機 ×2( 不同配置有所差異);
外置接口:1000M-Base-Ethernet×4 USB3.0×4;12V×4 5V×1 24V×4 BAT×1。
絕影——靈敏型四足機器人
云深處科技研發(fā)的“絕影”是一款面向行業(yè)應(yīng)用和場景展示的靈敏型四足機器人,可以協(xié)同(代替)人類到達任何可以到達的地方,具有優(yōu)越的環(huán)境適應(yīng)能力、優(yōu)異的動態(tài)平衡能力和精準的環(huán)境感知能力,通過在安全荷載區(qū)內(nèi)搭載不同應(yīng)用場景的功能模塊,可將四足機器人的移動優(yōu)越性與功能模塊的業(yè)務(wù)化進行有機融合。
靈敏的仿生步態(tài)
仿生足式結(jié)構(gòu)設(shè)計,離散式落足,讓“絕影”具備快速行走、跑跳、爬坡、上下臺階、匍匐、摔倒爬起等運動能力。靈敏穩(wěn)定的仿生步態(tài),更接近并適應(yīng)人居和自然環(huán)境,無需改造場地即可到達想去的地點,極大拓展了機器人的可達范圍和到達便捷度。
優(yōu)越的環(huán)境適應(yīng)
“絕影”可以兼顧運動的靈活性和穩(wěn)定性,彌補了傳統(tǒng)的輪/履式機器人對復雜路面適應(yīng)能力的不足,可以在草地、石子路、磚塊路、斜坡、臺階等非結(jié)構(gòu)性地面實現(xiàn)行走式移動,對環(huán)境具有更高的適應(yīng)性。
精準的感知決策
“絕影”搭載的智能感知模塊,融合了激光、視覺和慣導等多種傳感器,可以快速構(gòu)建復雜環(huán)境的3D地圖,完成高精度的定位導航,感測并識別設(shè)備(物體)的位置和信息,為應(yīng)用場景各設(shè)備單元提供有機連接。
開放的選配能力
標準化二次開發(fā)接口,絕影可提供多規(guī)格擴展性的開放需求,通過搭載的各類應(yīng)用模塊、智能硬件和其他傳感器,為不同的行業(yè)場景提供高可用性,安全性和可靠性的應(yīng)用需要,實現(xiàn)人類與機器人之間的直接合作。
快捷的自主充電
支持自主充電,通過對充電樁的自主識別、對接,自動完成整個充電過程。自主充電的便捷性,可以讓充電運行全過程免人工介入,“絕影”充滿電量后便可進入工作狀態(tài)執(zhí)行工作任務(wù)。
關(guān)鍵詞:
上一篇:
固定翼無人機半實物仿真系統(tǒng)
下一篇:
最后一頁
索取“此產(chǎn)品”詳細資料,請留言
*姓名:
*手機:
*郵寄地址:
相關(guān)閱讀
熱點文章
心理戰(zhàn)智能無人車
1
BAT低空無人機防御系統(tǒng) ——智能“立體”安防
2
無人機集群作戰(zhàn)應(yīng)用解決方案
3
軍用地面無人平臺現(xiàn)狀及發(fā)展趨勢研究
4
國產(chǎn)35克超微偵察無人機——蜂鳥PK黒蜂微型無人機
5
九洲防控“大盾”低空超低空防御系統(tǒng)——提供高效的“低慢小”及小微目標防御解決方案
6
首個無人機群戰(zhàn)例簡析:敘利亞戰(zhàn)場蜂群初顯鋒芒
7
無人平臺集群協(xié)同作戰(zhàn)指揮控制系統(tǒng)
8
無人平臺集群協(xié)同作戰(zhàn)指揮控制系統(tǒng)
9
軍博會歷正科技推新型無人機防御系統(tǒng)
10
低空安全“要地低空防護”解決方案
熱點技術(shù)
基于無人機航跡規(guī)劃優(yōu)化的幾種新型仿生智能優(yōu)化算法綜述
星際聯(lián)盟-低空安全系統(tǒng)平臺
大華無人飛行器在邊防領(lǐng)域的應(yīng)用展望
多無人機協(xié)同戰(zhàn)場環(huán)境偵察模擬訓練系統(tǒng)
“天弩”反無人機防御系統(tǒng)
適用于無人機的多路視頻圖像快速拼接系統(tǒng)
反無人機系統(tǒng)—智能“立體”安防
中睿無人機|SkyCells無人機智能巡檢系統(tǒng)
誘騙式靜態(tài)區(qū)域無人機防御系統(tǒng)
無人機蜂群戰(zhàn)術(shù)到底有多厲害
基于無人機航跡規(guī)劃優(yōu)化的幾種新型仿生智能優(yōu)化算法綜述
采用組合濾波算法的無人機航向測量系統(tǒng)研究
熱點方案
特戰(zhàn)利器——蜂鳥超微無人機系統(tǒng)
高原山地搜救強者—X120戰(zhàn)狼無人機
軍用地面無人平臺現(xiàn)狀及發(fā)展趨勢研究
首個無人機群戰(zhàn)例簡析:敘利亞戰(zhàn)場蜂群初顯鋒芒
無人平臺集群協(xié)同作戰(zhàn)指揮控制系統(tǒng)
低空安全“要地低空防護”解決方案
極客橋系留滯空救援系統(tǒng)
航翊科技發(fā)布HW600縱列式大載重無人直升機
多媒體互動數(shù)字沙盤系統(tǒng)設(shè)計方案
黃鵠科技亮相中關(guān)村武器裝備軍民融合創(chuàng)新發(fā)展論壇 ——矢志光電前沿科技
輕準科技 QZU-01察打一體武裝無人機
天龍智控科一站多機系統(tǒng)無人機亮相第十一屆中國國際國防電子展
產(chǎn)品推薦
“雀鷹"格斗無人機
長航時固定翼無人機 DT26X
賽鷹SY14KT系留旋翼無人機
CSD-PB-85R型排爆偵查機器人
六輪全地形獨立驅(qū)動全線控無人車輛
BL-JS400-GRQ無人機防御手持式干擾搶
國防部網(wǎng)站
|
中國軍網(wǎng)
|
央廣軍事
|
全國征兵網(wǎng)
|
環(huán)球網(wǎng)軍事
|
智慧軍營
|
鳳凰網(wǎng)軍事
網(wǎng)站首頁
|
關(guān)于我們
|
招聘信息
|
版權(quán)聲明
|
網(wǎng)站地圖
|
合作服務(wù)
|
留言本
微信公眾號
新浪微博
網(wǎng)站合作、內(nèi)容監(jiān)督、商務(wù)咨詢:010-88177728、qq:2251611637
京ICP備09030870號-2