一、產品簡介
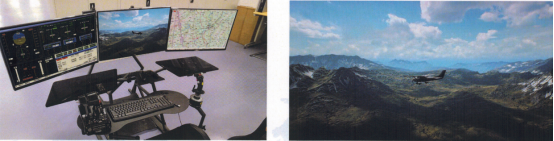
固定翼無人機半實物仿真系統由視景子系統、航跡規劃子系統和綜合操控子系統組成,遵循AATD、FTD Level 4固定翼飛行模擬器標準。
視景子系統基于UE4引擎還原真實的任務場景和固定翼飛行姿態;航跡規劃子系統提供地圖導航和航跡點規劃功能,可切換地圖場景、規劃任務路線;綜合操控子系統結合硬件提供真實的業務邏輯和逼真的操控手感。
二、產品特點
(一)真實的飛行體驗
系統基于AoriFlightSim飛行仿真引擎實現固定翼無人機的飛行仿真,使用半實物仿真框架,還原真實的操作體感;傳感器數據和碰撞效果等完全由物理引擎實時模擬,并使用UE4動畫實時渲染圖像,系統上層邏輯應用和真實固定翼無人機完全一致,能提供給使用者身臨其境的真實感受。
 (二)高集成化的設計
(二)高集成化的設計
系統具備高拓展性,用戶可以通過三臺或更多的顯示器,來獲取更好的視覺體驗,同時系統將固定翼無人機的視景系統、地面站控制系統以及操作系統集成到一體機中,可幫助學員快速了解與掌握固定翼無人機操作技能。
三、技術優勢
(一)可見光仿真
攝像頭仿真基于環境物體的幾何空間信息構建對象的三維模型,并根據物體的真實材質與紋理,通過計算機圖形學對三維模型添加顏色與光學屬性等,包括單目、雙目和魚眼攝像頭的仿真。
AoriFlightSim飛行仿真引擎實時生成高精度的紅外成像圖及各類紅外評估指標。仿真引擎經過了多套試驗數據校核和調優,具有了較高精度和實時計算效率。攝像頭仿真通過坐標系轉換的方法,將三維空間中的點通過透視關系變換為圖像上的點。對相機鏡頭的結構與光學特性,相機傳感器數據采集和處理過程,相機圖像信號處理過程,以及部分集成AI芯片的相機目標級識別結果進行仿真。
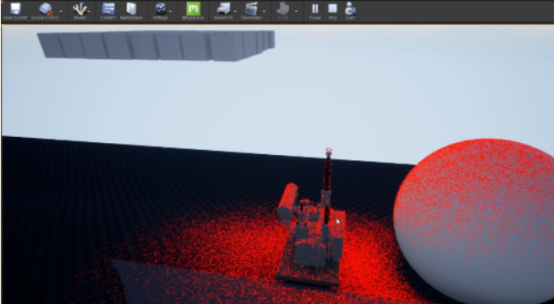
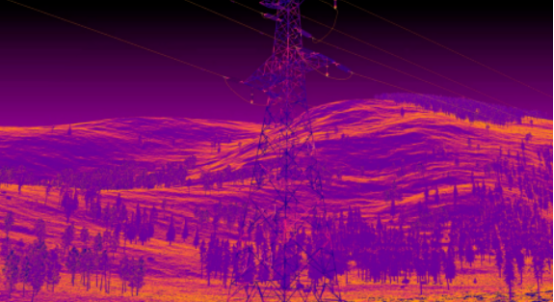 (二)激光雷達仿真
(二)激光雷達仿真
激光雷達仿真模擬雷達光電發射和接收的工作過程,激光束與仿真場景中所有物體求交,根據相交點的物理材質類型和屬性計算出該點的激光反射強度和噪聲。
AoriFlightSim仿真引擎使用基于GPU加速的激光雷達仿真方法和RTX顯卡實時光線追蹤技術,仿真出無限接近于真實世界的激光雷達點云。
激光雷達反射強度受到障礙物距離、激光反射角度以及障礙物本身的物理材質影響,仿真時需要給場景資源設置合適的物理材質,包括各種桿塔、花草樹木、地形、水文、障礙物、線路走廊等。AoriFlightSim仿真引擎從真實雷達掃描數據中提取反射強度模型驅動仿真模型,通過實際標定獲得物理材質在當前激光雷達下的反射強度和噪聲。
 (三)仿真測試
(三)仿真測試
針對特種領域高質量標記數據不足的情況,利用虛擬樣本結合少量人工標記樣本迭代式増量學習的方法,通過電力場景絕緣子自爆、防震錘缺失等實驗表明,對于不同數量的實際訓練樣本,通過添加虛擬樣本擴大訓練集后,圖像目標識別率均會得到提高,尤其在小樣本的情況下,識別率提高非常顯著,同時本方法在軍工等領域均有較好的應用前景。
四、應用場景與功能
(一)基礎環境
系統可模擬真實的氣象條件,例如:風、雨、雪等,并且支持設置風力、風向、光照等氣象條件,提供無限接近真實環境的操作體驗,鍛煉和強化固定翼無人機飛手的飛行經驗,避免正常飛行的意外損耗。
(二)機型配置
系統可自由選擇多種固定翼無人機訓練,其中涵蓋固定翼、垂起固定翼、上單翼、中單翼、下單翼等,用戶可按需進行針對性訓練;系統還原了固定翼無人機在實飛任務中的真實狀態,并提供各機型的航線繪制、起飛檢查、航點屬性設置、起飛模式、吊艙控制等流程的操作,高度還原真實任務狀態。
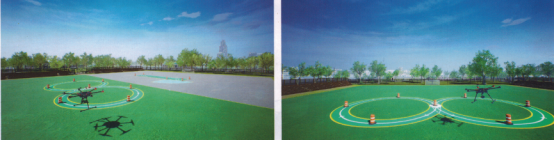
(三)自由視角
系統將所有任務場景做成3D實景效果,視覺效果震撼,并且可提供第三人稱視角、跟隨視角、吊艙視角等,讓學員更能深刻的了解無人機的飛行姿態等情況,滿足日常在真實環境下飛行的訓練需求。
(四)航跡規劃
系統提供地圖導航和航跡點規劃功能,可自由切換任務場景以及規劃當前場景中的任務路線,模擬真實的任務情景,滿足固定翼無人機的偵察、測繪、地勘、電力巡檢等各行業的全流程仿真培訓需求。
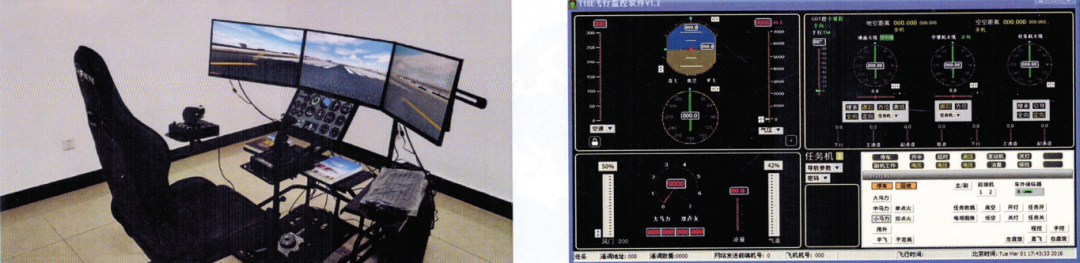
(五)飛行監控
系統可提供無人機監控模塊,實時動態監控無人機在任務中的飛行姿態、動力狀態、鏈路狀態和飛行信息;提供與實操機型一致的人機交互界面和監控顯示界面,還原最真實的固定翼無人機操控與監控流程。
(六)配套教具
系統可提供與真機等比的固定翼無人機配套教具,且教具內部集成真實飛控,通過Mavlink協議與固定翼仿真模擬系統聯動,展示機身飛行姿態的變化,提高學員體驗感和訓練效果。
(七)高拓展性
系統具備高拓展性,可在本系統的基礎上,定制特定任務場景、機型及業務流程,并且仿真系統能與各型固定翼無人機的操控器或結構組件結合,模擬指定機型真實的地面站、飛行監控和座艙等物理設施,還原真實的操控感受。同時也可拓展為固定翼載人機相關的仿真功能。




















