無人船是無人水面航行器(Unman Surface Vehicle)的簡稱。廣義的無人船是指一種可執行某類指定任務,并基于任務目的進行功能、性能設計的水面機器人;狹義的無人船則是指具有一定機動能力的水面自主、半自主、遙控搭載體。
一、無人船的系統組成
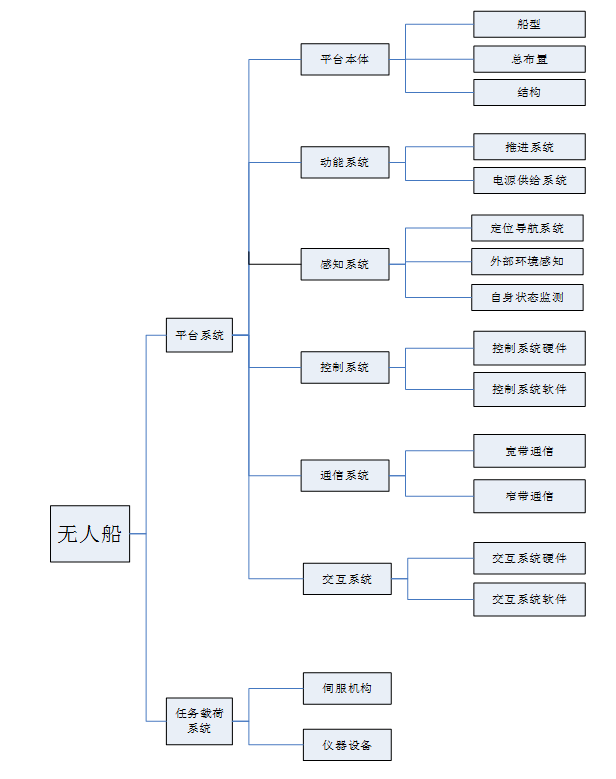
無人船由平臺系統和任務載荷系統組成,兩系統之間通過通用接口進行集成。平臺系統包括平臺本體分系統、動/能分系統、感知分系統、控制分系統、通信分系統和交互分系統,六個分系統共同組成無人船最基本的通用單元,可以獨自操作運行,是為完成不同任務而設計的搭載平臺。任務載荷系統指無人船用以執行任務的儀器設備及配套伺服機構、裝置,可根據不同任務目的、用途規劃出不同的任務載荷系統。
圖1 無人船系統組成
其中,平臺系統各分系統定義如下:
1.平臺本體分系統:包括船體設計與布置、材料與結構以及平臺機械,是無人船最基本的組成部分,為整個系統提供浮力、布置空間、執行機構以及必要的防護條件;
2.動/能分系統:包括推進系統和電源供給系統,為無人船提供必要的水面機動能力,并為控制系統和任務載荷系統等提供電力支持;
3.感知分系統:包括定位導航系統、外部環境感知系統和平臺狀態感知系統,為無人船運動決策與控制、自身狀態監測提供必要的數據源及硬件、接口支持;
4.控制分系統:包括控制系統硬件和軟件,是無人船的“大腦”,通過全船的感知及控制設備,為無人船處理、分析外部空間及內部環境信息,并根據核心控制算法實現自主航行、自主避障等功能;
5.通信分系統:包括控制端通信設備和執行端通信設備,為無人船搭建執行任務所需數據鏈路;
6.交互分系統:包括支持設備和交互軟件,為操作人員對無人船實施控制、了解狀態信息、下達自主指令等操作;
任務載荷系統定義如下:任務載荷系統指無人船用以執行任務的儀器、設備、武器及配套伺服機構、裝置等,一般設計為即插即用模塊,可根據不同任務目的和用途規劃出不同的任務載荷系統。
二、無人船的關鍵技術
無人船是海洋技術發展的產物,海洋技術發展目的是為了提升獲取數據的精度、準度、廣度以及連續性,同時提高獲取數據過程的安全性并降低其成本。海洋技術分兩個大方向,一是平臺技術或稱運載技術,主要指搭載體的設計、開發及應用等,另一個是傳感器技術或稱載荷技術,主要指儀器設備的設計、開發及獲得數據的解析、存儲和處理等。從學科方向劃分上來講,狹義的無人船屬于海洋技術領域的平臺技術。因此,無人船的核心技術與海洋技術領域的核心技術是一致的,實質就是圍繞任務目的、載荷原理、使用環境特點,以應用開發、功能開發為主體的系統設計,其關鍵技術主要包括以下幾個方面:
1.特型平臺設計技術
圍繞任務載荷原理、使用要求、作業方法等,對平臺進行針對性設計,如振噪抑制、削弱航行擾動、動穩性優化、電磁兼容性優化等。常規海洋調測使用的儀器設備多為聲學、光學、電化學接觸式傳感器。無人船吃水淺、布置空間緊湊,因此各種儀器設備容易受到平臺振動、自噪聲、航行過程中的晃動和產生的水花、氣泡附面層以及電磁輻射和動力系統排放等的影響,造成數據質量和作業效率下降。因此在無人船設計方面,就需要從系統效能的角度出發,圍繞任務載荷原理和對工作環境要求,對無人船從線形和結構設計、載荷布置方式、動力系統選型、推進裝置優化、運動控制策略設計、供電系統設計等方面進行有針對性的特殊設計和處理。
2.強擾動環境下的運動控制技術
針對海洋動力環境中風、浪、流對水面載具的影響,開發欠驅動運動控制算法,實現如高精度循線航行、高海況自航、自守位等功能。常規海洋調測多采用循線走航探測或定點剖面觀測的方式作業。無人船體量小、推力有限,且屬于典型的欠驅動運動體,因此容易受到海面動力因素的擾動,出現偏航距超限、航向不穩定、失速及大幅度搖動導致甲板上浪甚至傾覆的情況。因此在無人船運動控制方面,需要設計基于定位、姿態數據的前饋控制進行運動補償,通過無人船實時位置、航速、艏向、橫縱搖、升沉數據,判斷風、流的恒定擾動以及波浪的周期性擾動的強度、方向,結合無人船慣性力、阻力、恢復力運動模型,提前干預推力矢量輸出,確保無人船能夠在以較高精度循線航行,或在高海況下通過艏向、推力調節確保無人船不失速及發生大幅度橫搖。
3.通信技術
針對高動態、多徑效應影響突出的海面、水下復雜環境,開發健壯性強、穩定性好、低時延、高帶寬的微波、水聲通信技術。海上通信主要依賴微波(海面)和聲學(水下)兩種手段。無人船上建高度有限,且體量小、吃水淺、橫縱搖、升沉幅值大,微波通信設備天線距水面高度小同時存在較大搖晃幅度的情況下,通信距離受限,且容易受水面多徑效應影響造成信噪比下降,而水聲通信由于帶寬有限,往往只能進行極為有限的數據鏈支持。因此在無人船通信技術方面,需根據海洋環境的特殊性對通信系統進行設計,開發可應對高動態復雜水面環境的微波通信技術,以及更高帶寬的水聲通信技術,尤其是針對同構、異構平臺間的多節點組網、跨介質通信,仍有較多難點需要解決。
三、無人船應用領域及發展現狀
目前無人船從用途上,可分為兩大方向,海洋調查和測量(簡稱海洋調測)和防務。
綜上,作為一種水面自主平臺,搭載相應任務載荷的無人船相對于傳統載人船舶而言,優勢在于靈活機動、安全、隱蔽性強、運維費用低廉;未來發揮作用的場景主要包括以下三種:1.代替從業者執行勞動強度大、安全風險高的工作;2.代替從業者執行重復性、長周期的工作;3.取代部分施工成本高、人力投入大的工作模式或方法。
目前國內外有大量機構在進行無人船技術的研發工作,其中企業包括:美國科學應用公司、美國通用動力公司、美國諾格公司、以色列埃爾比特系統公司、以色列拉斐爾先進防務系統公司、以色列航空工業公司、英國奎納蒂克公司、英國ASV公司、德國阿特拉斯電子公司、法國ECA公司、日本雅馬哈公司、中國云洲智能科技等;科研院所、高校包括:美國海軍研究局、DAPPA、中國科學院沈陽自動化研究所、中國船舶重工集團公司旗下各研究所、哈爾濱工程大學、海軍工程大學、上海海事大學、大連海事大學、上海大學等。
在國家級資助研發項目方面,歐盟依托地平線2020計劃支持了無人智能船舶、低碳船舶技術等相關研究,中國依托科技部863計劃支持了遠程快速水面無人船的相關研究。
技術成熟度方面,美國等發達國家高度重視自主型USV發展,持續大力投入,目前在研和現役無人船共約19型63艘(其中美國研制的數量約占總數的50%),在反潛、反水雷、情報偵察、海洋環境調查等領域發揮了重要作用。
國內無人船技術研究起步較晚,且研發機構以高校、科研院所為主,因此產品化、工程應用方面較弱。前期重點發展專用遙控船船(不具備自主控制能力),目前已進入自主式無人船發展階段,現有的一些成熟的無人產品在海洋調測等方面已投入使用,且出現具備自主駕控能力的無人船產業化產品,但在體量超過20m的無人船方面還未出現產品或工程樣機。
國內外相關的典型技術和應用成果如下:
1.Ocean Infinite公司使用L3-ASV公司生產的C-Worker8作為水面通信節點和水下導航定位支持系統,通過與搭載聲學探測設備的AUV組網協同搜索馬航M370殘骸。
圖2 USV和AUV跨介質組網協同工作

圖3 無人船搜索馬航M370殘骸
2.Sail Drone公司推出的風帆動力無人船:通過將原生海洋能作為直接動力實現超長航時,執行中、大尺度物理海洋觀測任務。
圖4 Sail Drone風帆動力無人船

圖5 Sail Drone風帆動力無人船在冰島附近海域進行水文觀測
3.法國ECA公司開發了“Inspector Mk”系列USV可執行淺水/極淺水測量和檢查、瀕海/沿海水文測量工作、海港/海上設備監測和保護、目標探測和分類等典型任務。
圖6 ECA公司“Inspector Mk”系列無人船搭載相干聲吶條帶測深系統、側掃聲吶和水下機器人用于掃獵雷
4.哈爾濱工程大學在科技部“863項目”支持下開發了“天行一號”無人船。復合動力推進,航速超過50節。具備自主完成地形地貌測繪、水文氣象信息采集能力。
圖7 哈爾濱工程大學“天行一號”無人船
5.中國第34次南極科考航次使用珠海云洲智能科技有限公司設計、制造的M80海底探測無人船對羅斯海難言島(中國第五座南極考察站定址地)周邊進行全覆蓋水深地形測量,為新站建設時雪龍號錨地選址提供依據。
圖8 珠海云洲公司M80海底探測無人船搭載多波束條帶測深系統進行水下地形測量
四、無人船技術發展趨勢展望
目前無人船絕大多數采用了基于載人船配置方式的常規設計,其作業方式、使用方式也極大程度上參考了常規海洋調測船的施工慣例和模式,無人船系統的操作性、穩定性很大程度上取決于船體性能、通信能力和自主控制精度,無人船還無法形成獨立、完整的作業能力,因此現階段無人船的運用是作為傳統技術手段的復制和補充。
未來隨著材料技術、傳感器技術、智能控制技術以及相關法規的發展,無人船將逐步脫離傳統船舶的設計思路,設計開發將從“以船為核心”轉化為“以任務目的為核心”,無人船將從一種智能化水面搭載平臺轉變為針對某任務目的的作業系統,對人工干預的依賴性逐步降低,從控制端指令驅動的系統逐步發展成事件驅動型分散式系統,初步具備獨立、完整的作業能力,可替代部分傳統調查手段和方法,同時隨著各種針對無人平臺特點研發的新型任務載荷將大幅度提升無人船作業能力,催生出更多的基于無人船應用的系統解決方案。
目前初見端倪的兩類發展方向是新式特型平臺和多智能體異構集群協同能力的擴展。新式特型平臺突出單體針對特殊任務或極端環境的適應能力,如具備多模機動能力的可潛無人船,i7 Engineering公司研發的SUBMARAN風帆可潛無人船,該產品帶有一面可收折的剛性帆,在水面航行時通過剛性帆調節攻角進行航行,在暴風浪環境下可潛入水下駐留或利用電能航行,該類可潛無人船預計在極端氣象過程觀測、水下偵聽等特定領域會有較大的發展;另一類發展方向是多智能體異構集群協同能力,其對跨介質通信能力、運動控制算法等的依賴度較高,雖然目前已有部分機構取得了突破性進展,如Ocean Infinite公司的USV和AUV的跨域組網,云洲公司的多船協同等,但針對更廣闊的海洋調測、防務應用層面,技術水平仍有待提升。
隨著未來無人船相關領域的發展,其技術成熟度會逐漸加深,應用范圍逐漸擴展,尤其是在深遠海調查、工程領域,無人船將逐步取代部分常態化觀測、監測、支持技術,轉化為海洋調測、海洋工程的一種常規手段,同時系統具備完全獨立、完整的作業能力,傳統海洋作業模式將發生翻天覆地的變化。
來源:海洋信息。